Il differenziale per l'autoveicolo - approfondimenti
- Autore discussione AVC-Staff
- Data d'inizio
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.

Nel caso di un differenziale a basso rendimento interno, di rendimento R = 0,9 (che potrebbe anche essere un differenziale “reale” con un rendimento <1), la differenza di velocità angolare comporta una differenza di forza motrice; la ruota interna, inizialmente più lenta, sarà sottoposta ad una coppia superiore, fino al punto in corrispondenza del quale le velocità angolari delle ruote assumono un valore uguale. La differenza fra le coppie è proporzionale alla coppia motrice totale. la velocità relativa si mantiene nulla per tutto il campo di bloccaggio del differenziale
Allegati
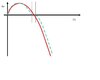


OK, il punto in cui il triangolo azzurro tocca la linea rossa corrisponde al valore di accelerazione trasversale in cui le due ruote girano alla stessa velocità, perchè l'effetto geometrico è perfettamente compensato dall'effetto del trasferimento di carico trasversale.
il discorso si fa interessante, è quasi un peccato che domani mi tocchi partire per le ferie :inocchio)
il discorso si fa interessante, è quasi un peccato che domani mi tocchi partire per le ferie :inocchio)
Aggiungerei in caso di differenziale ideale, perche' in caso di differenziale a rendimento <1 e' il punto in cui girano alla stessa velocita' E ricevono la stessa coppia.thranduil":3ext7ftl ha detto:OK, il punto in cui il triangolo azzurro tocca la linea rossa corrisponde al valore di accelerazione trasversale in cui le due ruote girano alla stessa velocità,
Alla stessa velocita' ci girano per tutta la "base" del triangolo.
Pronto alle mazzate
")
Allora, adesso vediamo il differenziale autobloccante a lamelle (tipo ZF) che abbiamo visto tempo fa.
Il differenziale ZF può essere simulato, con buona approssimazione mediante differenziali autobloccanti di rendimento costante; e l’andamento delle stesse curve diventa quello illustrato nelle figure qui sotto;
Il differenziale ZF può essere simulato, con buona approssimazione mediante differenziali autobloccanti di rendimento costante; e l’andamento delle stesse curve diventa quello illustrato nelle figure qui sotto;
Allegati



ah, ho dimenticato: ho suppostoun differenziale autobloccante tale che il rapporto tra le coppie (C1 e C2) fosse del 50%, quindi con un bloccaggio di (circa) il 25%....(fate voi bene i conti: adesso, sapete farlo!)
Non riesco a trovare dove abbiamo parlato del diff ZF.
Alla pagina precedente c'e' il diff a lamelle DanaTrack... va bene considerare quello?
Comunque, mi pare di capire che il comportamento di un diff a lamelle con percentuale di bloccaggio 25% sia uguale (o paragonabile) a quello di un diff con rendimento interno 0,5
Ma ora mi rendo conto che se il diff e' quello tipo DanaTrack allora non mi torna la frase che dice che la diff tra le coppie e' determinata dal precarico precarico.
Se non sbaglio le molle di precarico danno una certa "frenatura" quando la coppia applicata al diff e' molto bassa. Poi ci pensa la coppia applicata a far si che i planetari "spingano" sulle frizioni.
Alla pagina precedente c'e' il diff a lamelle DanaTrack... va bene considerare quello?
Comunque, mi pare di capire che il comportamento di un diff a lamelle con percentuale di bloccaggio 25% sia uguale (o paragonabile) a quello di un diff con rendimento interno 0,5
Ma ora mi rendo conto che se il diff e' quello tipo DanaTrack allora non mi torna la frase che dice che la diff tra le coppie e' determinata dal precarico precarico.
Se non sbaglio le molle di precarico danno una certa "frenatura" quando la coppia applicata al diff e' molto bassa. Poi ci pensa la coppia applicata a far si che i planetari "spingano" sulle frizioni.
bigno72":1rebrvkt ha detto:Non riesco a trovare dove abbiamo parlato del diff ZF.
Alla pagina precedente c'e' il diff a lamelle DanaTrack... va bene considerare quello?
Comunque, mi pare di capire che il comportamento di un diff a lamelle con percentuale di bloccaggio 25% sia uguale (o paragonabile) a quello di un diff con rendimento interno 0,5
......
1- il differenziale ZF è un differenziale autobloccante a lamelle. in pratica, quello che abbiamo usato per fare la teoria dell'autobloccante.
2- QUASI uguale, visto che qualche pagina fa ho detto che un diff autobloccante al 25% ha un rapporto tra le coppie di 1,6 (quindi una coppia è il 60% maggiore dell'altra..). però non avevo volgia di fare i conti giusti (infatti ho fatto l'esempio del 50%....mica *****, eh? :lol: )
Bene.
Allora, adesso facciamo l’ultimo passo.
Vediamo come queste informazioni si “legano” con il comportamento dell’auto in curva
Per fare ciò, dobbiamo avere presente “la madre di tutte le formule” e la curva di sottosterzo dell’auto (con tutti gli annessi e connessi…gradiente di sottosterzo, sottosterzo cinematico etc)
Bene: prendiamo due vetture UGUALI. La prima con differenziale normale (NON autobloccante)
La seconda CON diff autobloccante (a lamelle, ma va bene anche il Torsen se avete l’accortezza di considerare le ovvie differenze tra le due soluzioni, comunque ininfluenti al fine di ciò che interessa noi)
Guardate il grafico qui sotto che allego.
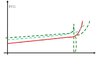
In rosso la vettura con differenziale libero normale
In blu, tratteggiata, la curva di sottosterzo della vettura con differenziale autobloccante.
Allora, adesso facciamo l’ultimo passo.
Vediamo come queste informazioni si “legano” con il comportamento dell’auto in curva
Per fare ciò, dobbiamo avere presente “la madre di tutte le formule” e la curva di sottosterzo dell’auto (con tutti gli annessi e connessi…gradiente di sottosterzo, sottosterzo cinematico etc)
Bene: prendiamo due vetture UGUALI. La prima con differenziale normale (NON autobloccante)
La seconda CON diff autobloccante (a lamelle, ma va bene anche il Torsen se avete l’accortezza di considerare le ovvie differenze tra le due soluzioni, comunque ininfluenti al fine di ciò che interessa noi)
Guardate il grafico qui sotto che allego.
In rosso la vettura con differenziale libero normale
In blu, tratteggiata, la curva di sottosterzo della vettura con differenziale autobloccante.
Allegati
allora
1- L’angolo di sterzo cinematico, quello che a suo tempo abbiamo chiamato “sottosterzo cinematico” (che poi è l’angolo di Ackermann), necessario a percorrere la curva a velocità nulla (DVOL0) aumenta con l’aumentare del fattore di bloccaggio del differenziale ed è massimo nel caso di differenziale bloccato. In pratica, il differenziale autobloccante (o totalmente bloccato) ha lo stesso effetto di un allungamento del passo della vettura e, quindi, richiede più angolo volante per percorrere la stessa curva. Questo perchè la distribuzione asimmetrica delle forze di trazione provoca una coppia di imbardata DI SOTTOSTERZO a velocità inferiori a quella di annullamento della velocità relativa; il pilota dovrà aumentare la deriva delle ruote anteriori, e quindi l’angolo di sterzo, per equilibrare tale coppia.
2- Tale coppia di imbardata si annulla nel punto di eguaglianza della velocità di rotazione delle ruote, e cambia successivamente di segno diventando coppia di sovrasterzo. Se guardate il grafico, la curva blu, ad un certo punto, ha un’inversione che anon è altro se non la descrizione, su grafico, della variazione di centraggio (da assetto sottosterzante ad assetto sovrasterzante) dell’auto. In pratica, fino ad un certo punto, avete che dovete agige sul volante per applicare una coppia (una forza sul volante) “a chiudere” per tenere la vettura sulla traiettoria; in quel punto, è il volante che –da solo- tende ad “avvitarsi” chiudendo la curva. Questo è, chiaramente, un comportamento poco piacevole. Dimenticavo: ci sono vetture dotate di differenziale autobloccante che hanno il comportamento descritto dalla curva blu; ma ci sono anche vetture, sempre con autobloccante, che possono avere il comportamento descritto dalla curva verde, dove la “chiusura” della curva è assolutamente repentina e violenta! Ciò dipende, anche e soprattutto, dal tipo di sospensioni adottate. Di più non dico. In ogni caso, entrambi i comportamenti sono brutti (uno è proprio pessimo!!)
3- Se stiamo considerando una trazione posteriore, la velocità limite, in corrispondenza della quale la deriva delle ruote posteriori diventa eccessiva e l’angolo di sterzo tende ad annullarsi, per cambiare successivamente di segno (sovrasterzo di potenza), si sposta verso valori più elevati per la riduzione della trazione sulla ruota scarica.
Chiaro che, nel caso di raggi di curvatura piccoli, la sostanza del fenomeno non cambia. Semplicemente, il punto di annullamento della velocità relativa si sposta ad accelerazioni più elevate, poiché la differenza di velocità alle ruote, provocata dalla differente curvatura, è predominante su quella provocata dallo scorrimento.
Se poi consideriamo una vettura con differenziale BLOCCATO del tutto (100% bloccaggio), la differenza di coppia sulle ruote è molto grande a causa degli scorrimenti imposti; ne risulta un elevatissimo appesantimento del volante a bassa velocità; da questo punto di vista, i differenziali a coefficiente di bloccaggio costante risultano meno penalizzanti.
Nel caso di trazione anteriore, inoltre, la coppia di imbardata risulta applicata al cinematismo dello sterzo, con un rilevante effetto di appesantimento del volante; in aggiunta la coppia agente sullo sterzo provoca degli angoli di sterzata aggiuntivi, per effetto dell’elasticità del cinematismo e delle sospensioni. Quindi le cose sono ancora peggiori che nella TP.
Ecco perchè l’impiego di differenziali autobloccanti e bloccabili sulle trazioni anteriori è alquanto limitato, se si esclude qualche esempio.
In caso di bassa aderenza le coppie di imbardata possono anche essere rilevati per l’influsso sulla stabilità. Tenete però presente che i trasferimenti di carico sono molto meno rilevanti, considerato il ridotto valore dell’accelerazione trasversale.
Insomma, il comportamento in curva di un veicolo con differenziale autobloccante sarà caratterizzato da un più marcato sottosterzo nella fase di inserimento in curva, seguito da più o meno brusche variazioni delle caratteristiche di guidabilità (anche se con maggiori margini nello sfruttamento dell’aderenza) Diciamo che si hanno miglioramenti di stabilità a scapito della guidabilità.
Questo vale per tutte le macchine, sia TP sia TA. Chiaramente, il peggioramento di guidabilità è tanto più evidente quanto più ridotto è il raggio di curvatura ed il livello di coppia richiesta (accelerazione in curva).
Ecco perché, per esempio, la Porsche 911 turbo NON ha un differenziale autobloccante, mentre la 911 GT2 (o GT3) ce l’ha: perché la Gt3 (o la GT2) hanno una caratterizzazione SPORTIVA. E qui arriviamo al punto: un’auto sportiva, a differenza di quanto si possa credere, NON è un’auto INSTABILE, ma anzi è una vettura che punta alla STABILITA’ (ci penserà poi il pilota a renderla instabile, quando vuole, se sarà capace). Al limite, è concesso un certo grado di instabilità su alcune particolari vetture: che so, su alcune vetturette da rally, che viaggiano a velocità (relativamente) basse su percorsi stretti e tortuosi. Ma, anche in questo caso, fino ad un certo punto. Di sicuro, nelle vetture da pista (F1, GT, etc), destinate a prendere elevate velocità, si tende alla stabilità.
Chiaramente, prendete queste ultime mie note “cum grano salis”….
QUESTE RAGIONI, QUELLE FIN QUI ESPOSTE, STANNO ALLA BASE DELLA CONSIDERAZIONE CHE COLORO CHE DECIDANO DI SOSTITUIRE IL DIFFERENZIALE DI SERIE CON UN DIFFERENZIALE AUTOBLOCCANTE (NELLO SPECIFICO IL TORSEN) SULLA GTA, SENZA PREVEDERE ALCUN’ALTRA MODIFICA SIA A LIVELLO DI SETUP SOSPENSIONI SIA DI SISTEMI ATTIVI DI AUSILIO ALLA GUIDA, SIANO DA CONSIDERARSI QUANTOMENO DEFICIENTI -moderatori, per favore, astenersi dal modificare il termine perché utilizzato con l’accezione semantica che gli è propria, ossia di “mancante” (di senno)- O, IN SUBORDINE, TEnnICI DI GRADO INFIMO.
A questo punto, avete gli strumenti necessari per comprendere il perché.
Detto questo,
1- non intendo più tornare sull’argomento Q2 sì, Q2 no.
2- Se volete, potete provare a pensare cosa fare per “sistemare” il comportamento della vettura dotata di autobloccante per renderlo il più possibile simile a quello (molto buono) della vettura di serie.
3- Come avete visto, chiaramente NON ho messo, sui grafici, alcun riferimento in termini di valori oggettivi. Questo per evitare che di queste informazioni si possano servire i TeNNici che hanno sostituito il differenziale col Q2 sulla propria vettura….anche se potrei benissimo metterli comunque: tanto, col cervello che si ritrovano (quello di un pesce pilota :lol: :lol: :lol: che, tra l'altro, esiste veramente :nod) ), non credo che capirebbero in ogni caso...(infatti, l'hanno montato, il Q2, e non si sono accorti di nulla....anzi, arrivano a sostenere che la macchina va persino meglio....
1- L’angolo di sterzo cinematico, quello che a suo tempo abbiamo chiamato “sottosterzo cinematico” (che poi è l’angolo di Ackermann), necessario a percorrere la curva a velocità nulla (DVOL0) aumenta con l’aumentare del fattore di bloccaggio del differenziale ed è massimo nel caso di differenziale bloccato. In pratica, il differenziale autobloccante (o totalmente bloccato) ha lo stesso effetto di un allungamento del passo della vettura e, quindi, richiede più angolo volante per percorrere la stessa curva. Questo perchè la distribuzione asimmetrica delle forze di trazione provoca una coppia di imbardata DI SOTTOSTERZO a velocità inferiori a quella di annullamento della velocità relativa; il pilota dovrà aumentare la deriva delle ruote anteriori, e quindi l’angolo di sterzo, per equilibrare tale coppia.
2- Tale coppia di imbardata si annulla nel punto di eguaglianza della velocità di rotazione delle ruote, e cambia successivamente di segno diventando coppia di sovrasterzo. Se guardate il grafico, la curva blu, ad un certo punto, ha un’inversione che anon è altro se non la descrizione, su grafico, della variazione di centraggio (da assetto sottosterzante ad assetto sovrasterzante) dell’auto. In pratica, fino ad un certo punto, avete che dovete agige sul volante per applicare una coppia (una forza sul volante) “a chiudere” per tenere la vettura sulla traiettoria; in quel punto, è il volante che –da solo- tende ad “avvitarsi” chiudendo la curva. Questo è, chiaramente, un comportamento poco piacevole. Dimenticavo: ci sono vetture dotate di differenziale autobloccante che hanno il comportamento descritto dalla curva blu; ma ci sono anche vetture, sempre con autobloccante, che possono avere il comportamento descritto dalla curva verde, dove la “chiusura” della curva è assolutamente repentina e violenta! Ciò dipende, anche e soprattutto, dal tipo di sospensioni adottate. Di più non dico. In ogni caso, entrambi i comportamenti sono brutti (uno è proprio pessimo!!)
3- Se stiamo considerando una trazione posteriore, la velocità limite, in corrispondenza della quale la deriva delle ruote posteriori diventa eccessiva e l’angolo di sterzo tende ad annullarsi, per cambiare successivamente di segno (sovrasterzo di potenza), si sposta verso valori più elevati per la riduzione della trazione sulla ruota scarica.
Chiaro che, nel caso di raggi di curvatura piccoli, la sostanza del fenomeno non cambia. Semplicemente, il punto di annullamento della velocità relativa si sposta ad accelerazioni più elevate, poiché la differenza di velocità alle ruote, provocata dalla differente curvatura, è predominante su quella provocata dallo scorrimento.
Se poi consideriamo una vettura con differenziale BLOCCATO del tutto (100% bloccaggio), la differenza di coppia sulle ruote è molto grande a causa degli scorrimenti imposti; ne risulta un elevatissimo appesantimento del volante a bassa velocità; da questo punto di vista, i differenziali a coefficiente di bloccaggio costante risultano meno penalizzanti.
Nel caso di trazione anteriore, inoltre, la coppia di imbardata risulta applicata al cinematismo dello sterzo, con un rilevante effetto di appesantimento del volante; in aggiunta la coppia agente sullo sterzo provoca degli angoli di sterzata aggiuntivi, per effetto dell’elasticità del cinematismo e delle sospensioni. Quindi le cose sono ancora peggiori che nella TP.
Ecco perchè l’impiego di differenziali autobloccanti e bloccabili sulle trazioni anteriori è alquanto limitato, se si esclude qualche esempio.
In caso di bassa aderenza le coppie di imbardata possono anche essere rilevati per l’influsso sulla stabilità. Tenete però presente che i trasferimenti di carico sono molto meno rilevanti, considerato il ridotto valore dell’accelerazione trasversale.
Insomma, il comportamento in curva di un veicolo con differenziale autobloccante sarà caratterizzato da un più marcato sottosterzo nella fase di inserimento in curva, seguito da più o meno brusche variazioni delle caratteristiche di guidabilità (anche se con maggiori margini nello sfruttamento dell’aderenza) Diciamo che si hanno miglioramenti di stabilità a scapito della guidabilità.
Questo vale per tutte le macchine, sia TP sia TA. Chiaramente, il peggioramento di guidabilità è tanto più evidente quanto più ridotto è il raggio di curvatura ed il livello di coppia richiesta (accelerazione in curva).
Ecco perché, per esempio, la Porsche 911 turbo NON ha un differenziale autobloccante, mentre la 911 GT2 (o GT3) ce l’ha: perché la Gt3 (o la GT2) hanno una caratterizzazione SPORTIVA. E qui arriviamo al punto: un’auto sportiva, a differenza di quanto si possa credere, NON è un’auto INSTABILE, ma anzi è una vettura che punta alla STABILITA’ (ci penserà poi il pilota a renderla instabile, quando vuole, se sarà capace). Al limite, è concesso un certo grado di instabilità su alcune particolari vetture: che so, su alcune vetturette da rally, che viaggiano a velocità (relativamente) basse su percorsi stretti e tortuosi. Ma, anche in questo caso, fino ad un certo punto. Di sicuro, nelle vetture da pista (F1, GT, etc), destinate a prendere elevate velocità, si tende alla stabilità.
Chiaramente, prendete queste ultime mie note “cum grano salis”….
QUESTE RAGIONI, QUELLE FIN QUI ESPOSTE, STANNO ALLA BASE DELLA CONSIDERAZIONE CHE COLORO CHE DECIDANO DI SOSTITUIRE IL DIFFERENZIALE DI SERIE CON UN DIFFERENZIALE AUTOBLOCCANTE (NELLO SPECIFICO IL TORSEN) SULLA GTA, SENZA PREVEDERE ALCUN’ALTRA MODIFICA SIA A LIVELLO DI SETUP SOSPENSIONI SIA DI SISTEMI ATTIVI DI AUSILIO ALLA GUIDA, SIANO DA CONSIDERARSI QUANTOMENO DEFICIENTI -moderatori, per favore, astenersi dal modificare il termine perché utilizzato con l’accezione semantica che gli è propria, ossia di “mancante” (di senno)- O, IN SUBORDINE, TEnnICI DI GRADO INFIMO.
A questo punto, avete gli strumenti necessari per comprendere il perché.
Detto questo,
1- non intendo più tornare sull’argomento Q2 sì, Q2 no.
2- Se volete, potete provare a pensare cosa fare per “sistemare” il comportamento della vettura dotata di autobloccante per renderlo il più possibile simile a quello (molto buono) della vettura di serie.
3- Come avete visto, chiaramente NON ho messo, sui grafici, alcun riferimento in termini di valori oggettivi. Questo per evitare che di queste informazioni si possano servire i TeNNici che hanno sostituito il differenziale col Q2 sulla propria vettura….anche se potrei benissimo metterli comunque: tanto, col cervello che si ritrovano (quello di un pesce pilota :lol: :lol: :lol: che, tra l'altro, esiste veramente :nod) ), non credo che capirebbero in ogni caso...(infatti, l'hanno montato, il Q2, e non si sono accorti di nulla....anzi, arrivano a sostenere che la macchina va persino meglio....
questo non lo capiscoalfistavero":1j2p3164 ha detto:è il volante che –da solo- tende ad “avvitarsi” chiudendo la curva
sto cercando di immaginarmi il comportamento della macchina, ma se mi viene bene di capire il passaggio da aggiunta di sottosterzo a aggiunta di sovrasterzo, non capisco questa cosa del volante che tende ad avvitarsi
cioè
finchè vado piano, l'autobloccante aggiunge sottosterzo
poi, quando vado un po' più forte, la ruota interna comincia a scaricarsi, perde aderenza, scivola (scorre) di più, gira uguale a quella esterna e sono "sulla linea di confine"
poi, andando ancora più forte, la ruota interna scorre "troppo" e l'autobloccante trasferisce coppia sulla ruota esterna, aggiungendo sovrasterzo perchè ciò crea un momento imbardante (e quindi la curva di sottosterzo piega verso il basso)
ma in tutto questo mi sfugge il perchè il volante dovrebbe tendere a chiudere, a meno che non ci sia una geometria delle sospensioni tale per cui ho (forti) reazioni al volante causate dalla coppia applicata alle ruote motrici, cosa che però non emerge di per sè dalle curve di sottosterzo
Diabolik":2y1cpq1g ha detto:......ma in tutto questo mi sfugge il perchè il volante dovrebbe tendere a chiudere, ..
perchè DEVO percorrere una traiettoria di raggio fisso e se PRIMA la condizione di stabilità era ottenuta con una certa coppia imbardante, ORA che la coppia imbardante è diversa, DEVO variare l'angolo sterzo per riportarmi nella condizione di equilibrio...
è un po' come se, ad un certo punto, cambiassi REPENTINAMENTE la rigisezza di deriva di uno dei 2 assi....