Il differenziale per l'autoveicolo - approfondimenti
- Autore discussione AVC-Staff
- Data d'inizio
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
thranduil":2nymscii ha detto:quindi quando parto con una ruota sola sul ghiaccio la ruota in aderenza riceverà comunque fino a DELTA Cmax?
JA
:spin)
Credo di esserci. Faccio una aggiunta per vedere se ci sono davvero:thranduil":2xf6nqi2 ha detto:quindi quando parto con una ruota sola sul ghiaccio la ruota in aderenza riceverà comunque fino a DELTA Cmax?
Se ho una ruota sul ghiaccio e fornisco in ingresso al differenziale bloccato una coppia uguale a DELTA C max, tale coppia andra' alla ruota in aderenza, che fara' spostare la macchina.
Se aumento la coppia in ingresso al differenziale, alla ruota in aderenza continuera' ad arrivvare DELTA C max, e la coppia in eccesso fara' slittare la ruota sul ghiaccio, ovvero fara' slittare tra loro i due lati della frizione o freno del differenziale.
Allora, anche se con un lieve ritardo, andiamo avanti
Adesso, consideriamo il caso 2, ossia il caso in cui il differenziale autoblocc funziona in condizioni di scorrimento, ossia quando la velocità angolare ω di una ruota è differente rispetto a quella dell’altra ruota.
Per determinare le equazioni del moto, devo distinguere 2 casi.
Detta, come sempre, ω1 la velocità angolare della ruota 1 e ω2 la vel angolare della ruota 2, devo distinguere tra:
ω1 > ω2 e
ω1 < ω2
E’ ovvio che la velocità angolare ω del porta treno, in virtù della formula di Willis (che vale sempre), sarà compresa tra ω1 e ω2.
Quindi, avrò:
ω1 > ω > ω2 e
ω1 < ω < v2
Ora, come sempre (ma ripetiamolo che fa sempre bene),
C1 è la coppia alla ruota 1
C2 la coppia alla ruota 2
C la coppia che arriva dal motore (coppia motrice C = C1 +C2)
Cs la coppia massima al limite dello scorrimento che si scambiano i due planetari (le due ruote, dx e sx): in pratica, ho eliminato il vincolo rappresentato dalle frizioni ad attrito tra i planetari e, al loro posto, ho messo la coppia Cs
Allora, vi risparmio tutta la menata della trattazione delle equazioni di moto passo passo (che non ce ne frega niente) e arrivo a darvi i risultati:
SE ω1 > ω > ω2 , allora
C1 = C/2 – Cs
C2 = C/2 + Cs
SE, invece, ω1 < ω < ω2, allora
C1 = C/2 + Cs
C2 = C/2 – Cs
Come al solito, la ruota più veloce si becca meno coppia; quella più lenta, più coppia.
Come vedete, il risultato non è poi molto dissimile (concettualmente) dal caso di differenziale a rendimento < 1 che abbiamo visto nei giorni scorsi.
Ora, guardate bene:
la coppia trasmessa a ciascuna ruota è la SOMMA di 2 parti. Una parte (C/2) che si trasmette attraverso i planetari; un’altra (Cs) relativo all’ATTRITO che agisce in senso INVERSO sulle 2 ruote (su una si somma a C/2; sull’altra si sottrae).
Ora, supponiamo che la ruota 1 stia sul ghiaccio e l’altra sull’asfalto.
Avrò, dalla prima delle due relazioni, che C1 = 0
E che C2 = C e anche che C = 2Cs; quindi C2 = C = 2Cs
Insomma, col differenziale autobloccante è possibile trasmettere TUTTA la coppia motrice (C) alla ruota in aderenza, mantenendo il motore a giri costanti (col differenziale libero o a rendimento <1 non era possibile: la coppia motrice, C, sarebbe finita ad accelerare la ruota sul ghiaccio), basta che questa NON superi 2Cs (quindi, non posso trasferire TUTTA la coppia motrice che può fornire il motore, ma solo –al massimo- 2Cs)
Questo, con un differenziale autoblocc a COPPIA COSTANTE (perché ci sono differenziali con coppia di bloccaggio NON costante, che però, alla fine, sono quasi simili a questo).
Ghe sèm?
Bene, se sì (cioè se ghe sèm), allora vorrei vedere il grafico che mette in relazione la coppia C2 in funzione della coppia C1, ossia la coppia (trasmissibile) ad una delle due ruote in funzione dell’altra. Per favore, mettere anche la retta che riproduce il differenziale “aperto” (quello con rendimento =1).
Fatto questo, ci divertiamo e dimostriamo che montare un diff autobloccante su una macchina pensata, progettata e messa a punto con un differenziale “libero” è un’operazione da mentecatti. :nod)
Insomma, andremo a dimostrare il “teorema del mentecatto” che recita:
preso un mentecatto (pseudo laureato in teNNica, dopo aver studiato sulle dispense fornitegli dal meccanico sotto casa) qualsivoglia che vale zero dal punto di vista tecnico, si può dimostrare che, se compra una GTA e gli sostituisce il differenziale montandogli un Q2, questi passa all’insieme dei mentecatti raglianti” (è un teorema di insiemistica…).
Poi, ci sarebbero pure alcuni corollari…. :X)
Adesso, consideriamo il caso 2, ossia il caso in cui il differenziale autoblocc funziona in condizioni di scorrimento, ossia quando la velocità angolare ω di una ruota è differente rispetto a quella dell’altra ruota.
Per determinare le equazioni del moto, devo distinguere 2 casi.
Detta, come sempre, ω1 la velocità angolare della ruota 1 e ω2 la vel angolare della ruota 2, devo distinguere tra:
ω1 > ω2 e
ω1 < ω2
E’ ovvio che la velocità angolare ω del porta treno, in virtù della formula di Willis (che vale sempre), sarà compresa tra ω1 e ω2.
Quindi, avrò:
ω1 > ω > ω2 e
ω1 < ω < v2
Ora, come sempre (ma ripetiamolo che fa sempre bene),
C1 è la coppia alla ruota 1
C2 la coppia alla ruota 2
C la coppia che arriva dal motore (coppia motrice C = C1 +C2)
Cs la coppia massima al limite dello scorrimento che si scambiano i due planetari (le due ruote, dx e sx): in pratica, ho eliminato il vincolo rappresentato dalle frizioni ad attrito tra i planetari e, al loro posto, ho messo la coppia Cs
Allora, vi risparmio tutta la menata della trattazione delle equazioni di moto passo passo (che non ce ne frega niente) e arrivo a darvi i risultati:
SE ω1 > ω > ω2 , allora
C1 = C/2 – Cs
C2 = C/2 + Cs
SE, invece, ω1 < ω < ω2, allora
C1 = C/2 + Cs
C2 = C/2 – Cs
Come al solito, la ruota più veloce si becca meno coppia; quella più lenta, più coppia.
Come vedete, il risultato non è poi molto dissimile (concettualmente) dal caso di differenziale a rendimento < 1 che abbiamo visto nei giorni scorsi.
Ora, guardate bene:
la coppia trasmessa a ciascuna ruota è la SOMMA di 2 parti. Una parte (C/2) che si trasmette attraverso i planetari; un’altra (Cs) relativo all’ATTRITO che agisce in senso INVERSO sulle 2 ruote (su una si somma a C/2; sull’altra si sottrae).
Ora, supponiamo che la ruota 1 stia sul ghiaccio e l’altra sull’asfalto.
Avrò, dalla prima delle due relazioni, che C1 = 0
E che C2 = C e anche che C = 2Cs; quindi C2 = C = 2Cs
Insomma, col differenziale autobloccante è possibile trasmettere TUTTA la coppia motrice (C) alla ruota in aderenza, mantenendo il motore a giri costanti (col differenziale libero o a rendimento <1 non era possibile: la coppia motrice, C, sarebbe finita ad accelerare la ruota sul ghiaccio), basta che questa NON superi 2Cs (quindi, non posso trasferire TUTTA la coppia motrice che può fornire il motore, ma solo –al massimo- 2Cs)
Questo, con un differenziale autoblocc a COPPIA COSTANTE (perché ci sono differenziali con coppia di bloccaggio NON costante, che però, alla fine, sono quasi simili a questo).
Ghe sèm?
Bene, se sì (cioè se ghe sèm), allora vorrei vedere il grafico che mette in relazione la coppia C2 in funzione della coppia C1, ossia la coppia (trasmissibile) ad una delle due ruote in funzione dell’altra. Per favore, mettere anche la retta che riproduce il differenziale “aperto” (quello con rendimento =1).
Fatto questo, ci divertiamo e dimostriamo che montare un diff autobloccante su una macchina pensata, progettata e messa a punto con un differenziale “libero” è un’operazione da mentecatti. :nod)
Insomma, andremo a dimostrare il “teorema del mentecatto” che recita:
preso un mentecatto (pseudo laureato in teNNica, dopo aver studiato sulle dispense fornitegli dal meccanico sotto casa) qualsivoglia che vale zero dal punto di vista tecnico, si può dimostrare che, se compra una GTA e gli sostituisce il differenziale montandogli un Q2, questi passa all’insieme dei mentecatti raglianti” (è un teorema di insiemistica…).
Poi, ci sarebbero pure alcuni corollari…. :X)
Emh, sbaglio o volevi dire che la ruota 2 sta sul ghiaccio?alfistavero":1pbijw0a ha detto:Ora, supponiamo che la ruota 1 stia sul ghiaccio e l’altra sull’asfalto.
Avrò, dalla prima delle due relazioni, che C2 = 0
E che C1 = C e che C = 2Cs (col meno…)
Se e' cosi' ci sono e ora provo a pensare al grafico.
Vediamo quante mazzate mi becco:
quando una ruota ha aderenza zero, la coppia limite sull'altra ruota e' (0+Cs)2 ovvero 2Cs
quando una ruota ha una certa aderenza, la coppia limite sull'altra (supponendo ad esempio la 1 piu' veloce, ovvero con minore aderenza) e' (C1+Cs)2
Quindi le 2 rette non finiscono proprio a meta' tra 0 e il limite di aderenza dell'altra ruota, ma un po' prima.
Se la ruota che gira piu' veloce ha il massimo di aderenza, l'altra superera' il suo limite di aderenza e iniziera' a slittare.
EDIT: ma questa forse e' una boiata. Quando la coppia resitente sulla ruota piu' veloce raggiunge
(Cmax/2)-Cs
(con Cmax intendo i llimite di aderenza della ruota) dovrebbe essere il caso di iniziare a sbloccare il differenziale....
quando una ruota ha aderenza zero, la coppia limite sull'altra ruota e' (0+Cs)2 ovvero 2Cs
quando una ruota ha una certa aderenza, la coppia limite sull'altra (supponendo ad esempio la 1 piu' veloce, ovvero con minore aderenza) e' (C1+Cs)2
Quindi le 2 rette non finiscono proprio a meta' tra 0 e il limite di aderenza dell'altra ruota, ma un po' prima.
Se la ruota che gira piu' veloce ha il massimo di aderenza, l'altra superera' il suo limite di aderenza e iniziera' a slittare.
EDIT: ma questa forse e' una boiata. Quando la coppia resitente sulla ruota piu' veloce raggiunge
(Cmax/2)-Cs
(con Cmax intendo i llimite di aderenza della ruota) dovrebbe essere il caso di iniziare a sbloccare il differenziale....
Allegati
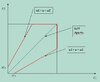
Modifico un attimo il grafico:
Per dire che idealmente quando la ruota veloce inizia ad aumentare il suo attrito, aumenta la coppia che trasferisco all'altra ruota, ma quando raggiungo il limite di aderenza dell'altra ruota dovrei ridurre il trasferimento di coppia fino ad arrivare alla stessa coppia sulle due ruote.
O leggendola nell'altro verso: quando una ruota inizia a perdere aderenza non devo subito bloccare il differenziale (ok, lo so, non e' bloccato ma c'e' comunque uno scorrimento), altrimenti l'altra ruota supera il suo limite di aderenza.
Devo (non so se i diff veri lo facciano, quindi DOVREI) trasferire all'altra ruota una porzione di coppia sempre maggiore fino a raggiungere il limite di attrito della frizione interna. Da questo punto la coppia trasferita alla ruota sull'asfalto inizia a diminuire, fino a 2Cs.
Per dire che idealmente quando la ruota veloce inizia ad aumentare il suo attrito, aumenta la coppia che trasferisco all'altra ruota, ma quando raggiungo il limite di aderenza dell'altra ruota dovrei ridurre il trasferimento di coppia fino ad arrivare alla stessa coppia sulle due ruote.
O leggendola nell'altro verso: quando una ruota inizia a perdere aderenza non devo subito bloccare il differenziale (ok, lo so, non e' bloccato ma c'e' comunque uno scorrimento), altrimenti l'altra ruota supera il suo limite di aderenza.
Devo (non so se i diff veri lo facciano, quindi DOVREI) trasferire all'altra ruota una porzione di coppia sempre maggiore fino a raggiungere il limite di attrito della frizione interna. Da questo punto la coppia trasferita alla ruota sull'asfalto inizia a diminuire, fino a 2Cs.
Allegati
bigno72":2j25rp63 ha detto:Emh, sbaglio o volevi dire che la ruota 2 sta sul ghiaccio?alfistavero":2j25rp63 ha detto:Ora, supponiamo che la ruota 1 stia sul ghiaccio e l’altra sull’asfalto.
Avrò, dalla prima delle due relazioni, che C2 = 0
E che C1 = C e che C = 2Cs (col meno…)
Se e' cosi' ci sono e ora provo a pensare al grafico.
giusto.
scusa.
correggo
bigno72":2lrpfolu ha detto:Vediamo quante mazzate mi becco:
quando una ruota ha aderenza zero, la coppia limite sull'altra ruota e' (0+Cs)2 ovvero 2Cs
quando una ruota ha una certa aderenza, la coppia limite sull'altra (supponendo ad esempio la 1 piu' veloce, ovvero con minore aderenza) e' (C1+Cs)2
Quindi le 2 rette non finiscono proprio a meta' tra 0 e il limite di aderenza dell'altra ruota, ma un po' prima.
Se la ruota che gira piu' veloce ha il massimo di aderenza, l'altra superera' il suo limite di aderenza e iniziera' a slittare.
EDIT: ma questa forse e' una boiata. Quando la coppia resitente sulla ruota piu' veloce raggiunge
(Cmax/2)-Cs
(con Cmax intendo i llimite di aderenza della ruota) dovrebbe essere il caso di iniziare a sbloccare il differenziale....
:bonk) :bonk) :bonk) :bonk)
metti C2 in funzione di C1 (o viceversa) dalle formule precedenti, ciaparàtt!!
e poi, vediamo come viene il coefficiente angolare della retta che hai disegnata....(ciaparàtt)!!
p.s. 2 Cs quanto vale? cioè: 2Cs = ....?
a lunedì'
mmm...
2Cs = DELTA Cmax
e probabilmente 2Cs = C1+C2 vale solo quando uno dei 2 elementi a destra vale 0...
forse sta qui l'inghippo... forse significa che la retta e' a 45 gradi non potendo aumentare oltre 2Cs la distanza dalla retta del diff aperto.
ora ci penso
2Cs = DELTA Cmax
e probabilmente 2Cs = C1+C2 vale solo quando uno dei 2 elementi a destra vale 0...
forse sta qui l'inghippo... forse significa che la retta e' a 45 gradi non potendo aumentare oltre 2Cs la distanza dalla retta del diff aperto.
ora ci penso
dalla prima delle due coppie di equazoni:
C2 = C1 + 2 Cs
p.s. cos'è 2 Cs?
adesso, (ri)provate col grafico...
C2 = C1 + 2 Cs
p.s. cos'è 2 Cs?
adesso, (ri)provate col grafico...
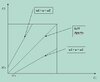
C2 – C1 = 2 Ca ossia
DELTA C = 2 Ca
Ora, se Cs è il MASSIMO VALORE di Ca al LIMITE dello slittamento, il MASSIMO valore di DELTA C consentito tra i semiassi (tra i planetari) a differenziale BLOCCATO
sarà
DELTA Cmax = 2 Cs = Cb
Cb è la COPPIA DI BLOCCAGGIO del differenziale
dalla prima delle due coppie di equazoni:
C2 = C1 + 2 Cs
2Cs = Cb (l'abbiamo visto prima)
quindi abbiamo:
C2 = C1 + Cb
e la speculare (invertendo l'interno coll'esterno)
C1 = C2 + Cb

una roba così?
thranduil":3b0d475i ha detto:
una roba così?
:spin)
ma togli la riga piùù bassa (a cosa serve? :bonk) )
quando hai fatto, andiamo avanti...
