bene.
allora, per far andare meglio la macchina mettiamo gli ammo.
l'ammortizzatore è un elemento il cui scopo è dissipare l'energia elastica della molla, smorzando l'oscillazione.
l'ammo genera una forza che si OPPONE al moto della massa (al moto relativo del sistema molla-massa); la forza che genera è PROPORZIONALE alla velocità con cui si muove la sospensione. più la sospensione si muove velocemente, maggiore (fino a un certo punto) è la forza che genera.
questo signifca che, se la sospensione non si muove, l'ammo NON lavora. se non c'è movimento, non c'è forza.
se la sospensione non si muove, la molle genera comunque una forza, perchè la forza elastica è funzione solo della posizione, della deformazione, della molla.
invece, se la sospensione non si muove, l'ammortizzatore NON genera alcuna forza, perchè la forza dissipatrice generata dall'ammo è funzione solo del movimento, della velocità.
tale forza, dunque, si può esprimere come F = C v dove v è la velocità con cui si muove la sospensione.
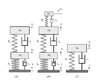
se quindi facciamo riferimento al nostro disegno, la mia v è la derivata rispetto al tempo di x, grado di libertà del mio sistema molla-massa (e ora ammortizzatore). quindi: F = C x' dove con x' ho indicato la derivata di x rispetto a t (dx/dt), cioè v, velocità.
anzi, per la precisione, dovrei scrivere F = -C x', col meno davanti, perchè è una forza che SI OPPONE al moto della sospensione.
il coefficiente C prende il nome di coefficiente di smorzamento dell'ammo.
quindi,
avrò che la mia massa (la scocca) in movimento sarà sottoposta, adesso, a 2 forze: quella elastica (già vista) e quella smorzante (dell'ammo)
quindi, F = - K x + (- C x') cioè F = - K x - C x'
ora, in base alla seconda legge di Newton
m x" = F = - K x - C x'
ossia
m x" + C x' + K x = 0
anche questa è un'equazione differenziale di second'ordine. con tutti i coefficienti, tra l'altro. e costanti.
adesso, se divido tutto per m avrò
x" + (C/m) x' + (K/m) x = 0
guarda guarda, ho ancora la mia K/m che è la mia pulsazione al quadrato e poi un termine C/m
domani vediamo cosa significa ciò.
") il diagramma di corpo libero ("free body diagram") mostra tutte le forze che agiscono su un oggetto. Superfici di contatto e vincoli sono, per convenzione, omessi.
il diagramma di corpo libero ("free body diagram") mostra tutte le forze che agiscono su un oggetto. Superfici di contatto e vincoli sono, per convenzione, omessi.