STERZATURA CINEMATICA.
Consideriamo, per ora, il solo caso cinematico. Poi, aggiungeremo le complicazioni andando verso il caso reale. Osservate la figura seguente:
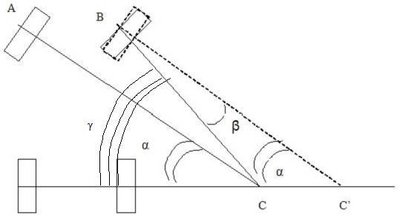
Come ormai dovreste (ben) sapere, per avere una sterzatura cinematicamente perfetta la ruota destra e quella sinistra devono sterzare con due differenti angoli. Per la precisione, la ruota interna, per avere correttezza cinematica, deve sterzare di più. Questo perché, in pratica, la mia macchina deve ruotare attorno ad UNO (e uno solo) centro di istantanea rotazione che, nel nostro caso, è il punto C. il punto C è facilmente determinabile: è chiaro che deve stare sulla retta perpendicolare all’asse posteriore (perché, come sappiamo, traccio la retta perpendicolare alla velocità, all’atto di moto, delle mie ruote; insomma, è la stessa metodologia usata per determinare il centro di istantanea rotazione della sospensione per la definizione del centro di rollio…); inoltre, deve stare anche sulla retta perpendicolare all’asse della ruota esterna (la retta A-C). Quindi, la ruota interna dovrà essere più sterzata affinché anche la retta perpendicolare al suo asse possa intersecarsi in C.
C è il centro di istantanea rotazione, cioè il centro attorno a cui ruota la macchina quando faccio la curva. Perciò, la mia ruota interna formerà un angolo, rispetto all’asse posteriore (quello indicato in figura con la lettera greca gamma γ), differente rispetto a quello (indicato in figura con la lettera greca alfa α) formato dalla ruota esterna.
Ripeto: per avere una sterzatura cinematicamente corretta, γ e α devono essere differenti. Nella realtà, però, questo NON avviene quasi mai. Anzi, al limite, su alcune macchine (poi vedremo quali), le ruota destra e quella sinistra sterzano dello stesso angolo (e, infatti, io ho disegnato un angolo α anche alla ruota interna). Diciamo comunque che, in linea di massima, l’angolo varierà tra i due estremi: da una parte il valore γ, corrispondente alla sterzatura cinematicamente corretta; dall’altro, il valore α, corrispondente alla sterzatura della ruota interna UGUALE a quella della ruota esterna. Ora, l’angolo β che indica la differenza tra il valore che dovrebbe corrispondere ad una sterzatura cinematicamente corretta (γ) e il valore realmente assunto dalla ruota interna (che qui ho messo UGUALE all’angolo della ruota esterna, quindi α), prende il nome di angolo di Ackermann. Ed è l’angolo di “scorrezione” cinematica, ossia indica quanto “scorretta” è (quanto lontano sono dalla condizione di correttezza cinematica) la mia sterzata.
E’ chiaro che, in queste condizioni, cioè in condizioni di sterzatura scorretta, durante il movimento dell’auto, ci saranno degli strisciamenti: la ruota interna “striscerà” anziché rotolare. E questo influisce sull’usura dei pneumatici e sulle forze da imprimere allo sterzo per compiere la curva (anche se, in questo caso, l’introduzione del servosterzo ha annullato il problema…).
Tutte le auto, chi più chi meno, presentano delle “scorrezioni” di sterzo.
Naturalmente, ci sono dei cinematismi, cioè delle soluzioni tecniche, che consentono di contenere queste scorrezioni entro valori accettabili (o voluti), in modo che queste assumano i valori che si vogliono ottenere. vedremo tra poco quali sono questi cinematismi.
Prima però pongo un quesito: secondo voi, perché una macchina dovrebbe avere delle scorrezioni di sterzo (relativamente) ampie? cioè, detto in altre parole, perché un tecnico dovrebbe tollerare (anzi, magari proprio andare a cercare) delle scorrezioni di sterzo (relativamente) elevate? Perché avere tanto “Ackermann"?
(Tenete conto che la ricerca di queste scorrezioni è importante nel caso di vetture a trazione anteriore....le TP non ne hanno bisogno...e quindi non le cercano)…
Perchè su un veicolo a trazione anteriore le ruote anteriori esprimono sia forza longitudinale che forza laterale; introducendo una deviazione dalla condizione di sterzatura cinematica (quindi Ackermann diverso da zero) posso cercare di ridurre l'angolo di deriva della ruota anteriore interna e quindi di limitare la forza laterale espressa dal pneumatico, allontanando la condizione di saturazione.
Pertanto, una certa correzione può essere voluta su una vettura TA se cerco di darle più motricità, mentre su una vettura TP non ho molti vantaggi ad assumere un angolo di Ackermann elevato.
Andiamo avanti. Mi sembra chiaro che per ottenere una corretta sterzatura cinematica, occorre un sistema di collegamento tra le due ruote in grado non solo di farle ruota con angoli differenti durante la sterzata, ma anche di farle ruotare secondo una ben precisa legge di sterzata, che è quella che abbiamo visto prima, cioè con una divergenza tanto maggiore quanto minore è il raggio della sterzata, cioè quanto più giro il volante per sterzare.
E il sig. Ackermann riuscì ad ottenere questa condizione attraverso la realizzazione di un meccanismo alquanto complesso, ma precisissimo (da buon tedesco….), che richiedeva l’uso di coppie prismatiche e una difficile realizzazione. Purtroppo, oltre che complicato era anche, ovviamente, molto costoso. Per cui, praticamente, non applicabile. Oltretutto, come abbiamo detto, in realtà le condizioni di perfetta sterzatura cinematica sono importanti, ma fino ad un certo punto.
Quindi, ci si è accontentati di una soluzione ben più semplice e pratica che venne proposta da un tale di nome Jeantaud; il quale, da buon francese, era un bell’approssimativo…..
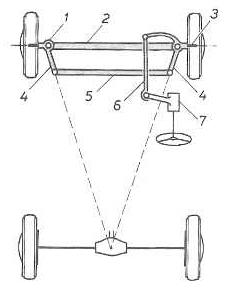
Il disegno qui sotto riproduce lo schema del quadrilatero di Jeantaud. Come vedete, ci sono due bracci di accoppiamento, inclinati rispetto all’asse vettura di un certo angolo e rigidamente accoppiati ai fuselli delle ruote, e una barra di accoppiamento che, nel caso delle nostre vetture, è spesso sostituita dalla scatola dello sterzo (la cremagliera). Nei fuoristrada, invece, questa è proprio una barra e lo sterzo agisce, attraverso un braccio su uno solo dei fuselli (di una ruota) e, da questo, attraverso la barra, avviene la rotazione anche della seconda ruota (proprio come nel disegno qui sotto). Ma il discorso è esattamente analogo. Noi, per semplicità, ci riferiamo al caso che ci interessa, che è quello della soluzione adottata sulle nostre macchine, quindi con la scatola guida al posto della barra.
Nota: Tenete sempre presente che questi sono discorsi assolutamente generali, perché poi in realtà ci dobbiamo sommare l'elastocinematica della sospensione, gli scuotimenti, le variazioni di coppia e i punti di applicazione delle forze....per cui il discorso si complica parecchio.
Comunque, diciamo che un certo Ackermann è tollerato, se non proprio voluto, perché mi aiuta anche nel riallineamento: se avessi una sterzata cinematicamente corretta agli alti angoli, poi mi troverei nei casini nel ritorno volante (sempre perché si sommano i contributi della coppia motrice, dei bracci a terra e dei bracci a centro ruota), per cui il fatto che la ruota interna "giri" meno di quello che dovrebbe mi aiuta certamente.
Infatti, guardate le Mercedes (o le BMW): dalla massima sterzata il volante ritorna con difficoltà... Anche se poi, anche per questo problema, ci sono delle furbizie, tipo il "ritorno attivo" che è implementato sui servosterzi elettrici.
Torniamo al nostro quadrilatero e alla nostra figura. Vedete che i prolungamenti dei bracci s’incontrano in un punto, sull’asse di mezzeria del veicolo.
Bene, si può dimostrare che la condizione ideale è quella in cui il punto d’incontro dei due prolungamenti dei bracci debba cadere sull’assale posteriore (o, meglio, se per caso abbiamo un ponte a bracci tirati, sulla retta che congiunge i 2 centri ruota delle ruote posteriori). Questa sarebbe la condizione ideale, per ottenere le minime scorrezioni, che comunque rimangono. Rimangono perché, come detto, il quadrilatero è comunque un'approssimazione; e perché, in ogni caso, gli accoppiamenti tra i vari bracci NON sono perfetti, ma c’è sempre un gioco.
Quindi, si genera un errore, un angolo.
Se ciò non avvenisse, avrei che durante la sterzata, le mie ruote (dx e sx) tenderebbero a divergere secondo una legge ben definita (che non sto qui a scrivervi perché non serve a nulla) e il mio errore sarebbe nullo. Invece, l’errore c’è ed è variabile in funzione della sterzata (cioè varia al crescere dell’angolo di sterzo). Questo errore, in pratica, altro non è se non l’angolo di Ackermann.
Ad essere precisi, va anche detto che si può cambiare la posizione del braccio di interconnessione tra i due fuselli, collocandolo in posizione avanzata rispetto al centro ruota. Pensate, per esempio, alle varie BMW o Porsche, o altre vetture sportive che hanno la scatola guida davanti alle ruote: il discorso è perfettamente analogo, basta solo che sia verificata la condizione (fondamentale) che i prolungamenti dei bracci di accoppiamento s’incontrino in un punto sulla mezzeria del veicolo.
In quest’ultimo caso, poi, il mio quadrilatero prende il nome di quadrilatero di Panhard, anziché di quadrilatero di Jantaud come nel caso della scatola guida posta dietro le ruote (come nelle nostre macchine, 147, 156, Bravo, Punto; ma anche Alfetta e derivate).
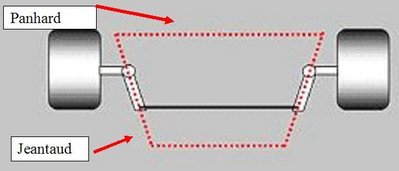
Se metto il braccio (qui posto dietro al centro ruota) davanti alle ruote, basta solo che mantenga la convergenza verso l'asse posteriore.
Ora, se riportiamo in un grafico il valore di questo errore in funzione di uno dei due angoli (di una delle due ruote), diciamo per esempio dell’angolo di sterzo assunto dalla ruota interna (per esempio, eh), al variare di dove metto il punto di incontro dei prolungamenti dei bracci (cioè se lo metto perfettamente sull’asse posteriore; oppure davanti all’asse; oppure dietro) abbiamo un grafico come quello messo qui sotto.
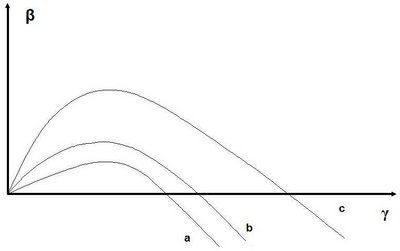
Ho usato la notazione del primo disegno, quindi GAMMA è l'angolo della ruota interna e BETA è l'errore...
Il grafico riporta l’andamento dell’errore di sterzo (il mio BETA) in funzione dell’angolo di sterzo della ruota interna (GAMMA) per tre differenti punti di intersezione dei prolungamenti dei bracci del parallelogramma di Jantaud. Sull’ordinata ho il valore dell’angolo di sterzo (GAMMA) della ruota interna.
ATTENZIONE: ho scritto RUOTA INTERNA. ricordatevelo, perché è su quella che dobbiamo fare i nostri ragionamenti
Prendiamo una qualunque delle curve, quella che volete. La a, la b o la c, non importa. Importa guardare l’andamento qualitativo.
Per GAMMA = 0 l’errore è nullo. Giusto. Perché quando la ruota interna è diritta (angolo di sterzo nullo), anche la ruota esterna è diritta. E la macchina va diritta. E l’errore di sterzatura non c’è. Poi, al crescere di GAMMA, la curva dapprima cresce, fino a raggiungere un massimo e da qui comincia a decrescere. Il valore di BETA è comunque sempre positivo. Significa che, al crescere della sterzata, il mio errore cresce (in segno positivo); ossia, se andiamo a vedere il primo grafico che ho postato, il mio BETA, cioè l’errore di sterzo, è come quello disegnato nel grafico. Ad un certo punto, succede che per un determinato valore di GAMMA, il mio errore torna a valere zero, ad annullarsi. Significa che, in quella particolare posizione contraddistinta dal valore (sul grafico) di GAMMA in cui la curva interseca l’asse delle ascisse, sono in condizioni di errore nullo, quindi di sterzatura perfettamente cinematica. Andando oltre, il segno dell’errore s’inverte, diventando negativo e comunque continua a crescere (negativamente). Cosa significa? Vi ricordate che ieri abbiamo detto che, durante la sterzata, deve realizzarsi una divergenza tra le ruote se voglio avere una sterzata perfettamente cinematica? Bene: se l’errore è positivo, come nel primo tratto della curva, significa che rispetto alla mia “divergenza ottimale” che mi garantirebbe la correttezza cinematica, sono “un po’ meno divergente” (cioè tendo a – come dire - “convergere” rispetto alla divergenza “ottima”), e la mia curva sta sopra l’asse delle ascisse (anche se con l’andamento che abbiamo visto: prima l’errore cresce, poi arriva ad un massimo; poi decresce fino allo zero); se l’errore è negativo, invece, significa che sono sotto l’asse delle ascisse e la mia condizione è quella di essere “un po’ (più o meno in funzione dell’errore corrispondente a quel valore particolare di GAMMA) più divergente” rispetto alla condizione di “divergenza ottimale”.
Sappiate, prima di tutto, che la condizione in cui il punto di intersezione dei prolungamenti dei bracci del parallelogramma di Jantaud cade PERFETTAMENTE sull’asse posteriore (garanzia di perfetta, per così dire, sterzatura cinematica; anche se come potete vedere non è affatto così, perché altrimenti al posto della curva rappresentata sul grafico avrei una retta coincidente con l’asse delle ascisse, indice di errore perfettamente uguale a 0) è quella rappresentata dalla curva b.
Adesso, per favore, non state a guardare se le curve a e c sono equidistanti dalla b oppure no; oppure se la a è più vicina alla b di quanto non lo sia la c: prima di tutto, quel grafico l’ho fatto io e me lo sono inventato (quindi, NON ho preso dei risultati sperimentali veri); e poi, è sempre possibile prendere dei punti di intersezione più o meno lontani dall’asse posteriore, con risultati quindi, differenti (e, di conseguenza, con curve differenti).
La curva a è una conseguenza dell’aver posizionato il punto di intersezione dei prolungamenti dei bracci del parallelogramma di Jantaud ALL’INTERNO degli assi del veicolo (tra l’asse anteriore e l’asse posteriore). La curva c, invece, è la curva rappresentativa della collocazione del punto suddetto OLTRE l’asse posteriore.
Prendiamo, ad esempio, la curva a. Come vedete, per piccoli angoli di sterzo, l’errore di sterzata è MINORE rispetto alla b, che prendiamo come riferimento.
Ma l’errore si annulla prima che nella b e poi cresce (negativamente) in maniera più rapida che nella b
L’esatto contrario nel caso della curva c: all’inizio l’errore di sterzatura è più alto che nella b (curva teorica di riferimento) ma poi, per maggiori angoli di sterzo, rimane più contenuto (sempre rispetto alla b).
Quindi:
- se voglio minimizzare gli errori di sterzatura per piccoli angoli di sterzo (cioè per grandi raggi di curvatura che sono poi quelli percorsi ad alta velocità), allora devo riferirmi alla curva a, quindi posizionare il punto di intersezione dei prolungamenti dei bracci del parallelogramma di jantaud all’interno degli assi del veicolo. Quindi, devo inclinare di più i bracci dei fuselli;
- al contrario, se voglio minimizzare gli errori di sterzatura per grandi angoli di sterzo (cioè per piccoli raggi di curvatura che sono poi quelli percorsi in manovra o a bassa velocità), allora devo riferirmi alla curva c, quindi posizionare il punto di intersezione dei prolungamenti dei bracci del parallelogramma di Jantaud oltre il retrotreno. Quindi, devo inclinare di meno i bracci dei fuselli.
Diciamo che, in generale, nella maggior parte delle macchine di serie che non abbiano particolari pretese, si usa collocare il punto di intersezione dei bracci dei fuselli un pochino all’interno (partendo dall’asse posteriore) dei due assi (che significa dare ai bracci un’inclinazione un po’ maggiore di quella ideale = che mi fa coincidere il punto d’intersezione con l’asse posteriore), questo per avere i minori errori di sterzatura ai medi a ai grandi angoli di sterzo. Pur sapendo:
- che la perfetta sterzatura cinematica è comunque impossibile con questo parallelogramma;
- che devo tenere in conto il fatto che la sospensione e lo sterzo hanno un comportamento “elastocinematico”;
- che, infine, la sterzatura cinematica, quando la macchina si muove, NON esiste (un bell’esempio di sterzatura cinematica è la ruota di un treno: per caso, avete mai visto una macchina con le ruote di “ferro”?).
Torniamo ancora al grafico, considerando la curva a.
Abbiamo detto che l’errore, per i piccoli angoli di sterzo, è minore che nel caso della curva b.
Ma guardiamo meglio: un errore minore cosa significa? Abbiamo detto che errore (positivo) significa che sono “un po’ meno divergente” rispetto alla mia divergenza ottimale; e che errore negativo significa che sono “un po’ più divergente” rispetto alla condizione ottimale.
Ma… ATTENTI BENE!!!
Abbiamo anche detto che quel grafico riporta l’andamento dell’errore in funzione dell’angolo di sterzo (GAMMA) della……RUOTA INTERNA.
Quindi, dobbiamo fare riferimento alla RUOTA INTERNA.
Per bassi valori di angolo sterzo (cioè quando vado veloce, su curve ad ampio raggio), a pari GAMMA la mia curva a offre un minore errore cinematico rispetto, per esempio, a c. Cosa significa questo?
Che, tenendo fermo GAMMA della ruota interna (perché è a quella che faccio riferimento per il mio grafico), nel caso descritto dalla curva a la mia ruota esterna sarà MENO STERZATA che nel caso della curva c (e anche di quello della curva b).
Ora, qual è la ruota che “prevale” in curva?
ESATTO! La ruota esterna!
E quindi, se sposto l’inclinazione dei bracci collegati ai fuselli, oltre ad ottenere un punto di intersezione interno ai due assi che mi permette di ridurre gli errori di sterzatura cinematica, COSA ottengo ANCHE?
ESATTO!!! Una minore sterzatura della ruota esterna (a pari angolo di sterzo interno, eh)! E quindi?
ESATTO!!!!! Più sottosterzo, perché se mantengo costante l’angolo della ruota interna (che sarebbe il mio riferimento per la comprensione di questo grafico), una diminuzione dell’errore di sterzo equivale ad una “apertura” (“divergenza”) della ruota esterna, che è poi quella che “guida” la macchina.
Riassumendo:
partendo dalla condizione ideale (per modo di dire, eh!) che consiste nel posizionare il punto di intersezione dei prolungamenti dei bracci del parallelogramma di Jantaud sull’asse posteriore:
1) se sposto questo punto verso l’interno (tra i due assali), riduco (rispetto alla condizione ideale, tenetelo sempre presente!!) gli errori di sterzatura cinematica ad alta velocità (a bassi angoli di sterzo; sui grandi raggi di curvatura), li aumento a bassa velocità (ad alti angoli di sterzo; su stretti raggi di curvatura). Ma aumento il sottosterzo;
2) se invece sposto questo punto oltre l’asse posteriore, aumento (anche qui: rispetto alla condizione ideale!!) gli errori di sterzatura cinematica ad alta velocità (a bassi angoli di sterzo; sui grandi raggi di curvatura), li riduco a bassa velocità (ad alti angoli di sterzo; su stretti raggi di curvatura). Ma diminuisco il sottosterzo.
Però, considerato che la condizione di sterzatura cinematica (o comunque di una sterzatura molto corretta) per tutti i raggi di curvatura (e/o anche in generale) è meno importante di quanto non si possa pensare, perché comunque la sterzatura “dinamica”, l’elastocinematica delle sospensioni e i giochi (inevitabili) della catena cinematica di sterzo (e dei semiassi, etc, ect) comportano degli errori di gran lunga ben maggiori del massimo errore di sterzatura del quadrilatero dello sterzo, possiamo affermare che della sterzatura cinematica, tutto sommato, possiamo (quasi) “fregarcene”.
Quindi: W l’ACKERMANN!
Aggiungo solo che:
1) in tutto quanto detto fin qui non si è tenuto conto del fatto che la sospensione lavora, quindi a questi fenomeni vanno sommati gli effetti dell'elastocinematica della sospensione durante gli scuotimenti (recuperi di camber, convergenza, etc);
2) le macchine da corsa (F1 e GT e macchine da corsa VERE) hanno i bracci dei fuselli PERFETTAMENTE paralleli all'asse vettura (cioè NON inclinati), quindi con grandi correzioni.
Se notate, l'Ackermann è UNO dei (tantissimi) modi di modificare il comportamento dell'auto (modificare il comportamento sotto/sovrasterzante, per esempio). Però, NON è l'unico: deve essere chiaro.
Diciamo che, in realtà, l'Ackermann serve soprattutto per "linearizzare" il più possibile la sterzatura dell'auto: una vettura più lineare nel comportamento è sicuramente più bella da guidare.
Cosa significhi "linearizzare", lo vedremo più avanti.
MODELLO A BICICLETTA.
Introduciamo il modello a bicicletta.
Che cosa vuol dire? Vuol dire che considero la macchina in maniera molto semplice, conglobando l’asse anteriore e l’asse posteriore (o, meglio, gli effetti generati dall’uno e dall’altro) in due ruote: anteriore e posteriore.
Questo vuol dire, per esempio, che la ruota anteriore genererà le forze che vengono generate da TUTTO l’asse anteriore. E così dietro.
Ma vuole anche dire che, ai fini del nostro calcolo, non terremo conto dei trasferimenti di carico, per esempio. Né laterali (rollio), né longitudinali (beccheggio, ect). Naturalmente, questo significa anche che non considereremo il rollio e il beccheggio; intesi come movimenti, come angoli.
Insomma, è come avere una bicicletta (appunto!) che, per sterzare, non s’inclina ma lo fa semplicemente ruotando la ruota anteriore. Attenti bene: la ruota anteriore, come d’altronde quella posteriore, generano FORZE! Quindi, sono distanti dalle condizioni cinematiche che abbiamo visto nelle discussioni passate (per esempio nel caso dell’Ackermann): e, per generare forze, le ruote devono avere SCORRIMENTI. Cioè scorrimento longitudinale e scorrimento trasversale (deriva).
Ma a noi, per quello che ci interessa vedere, cioè l’handling (che poi altro non è se non la dinamica dell’auto in senso trasversale), dello scorrimento longitudinale (quello che abbiamo chiamato SIGMA, indicandolo con σ e che consente di frenare e accelerare) NON CE NE FREGA NULLA.
Rimane, allora, la DERIVA. Quindi, ripassatevi bene la deriva e NON confondetela con l’angolo di sterzo, che è un’altra cosa.
Diciamo anche che, nel modello “a bicicletta” che abbiamo qui schematizzato, non introduciamo forze aerodinamiche (e ci mancherebbe: che ci frega?).
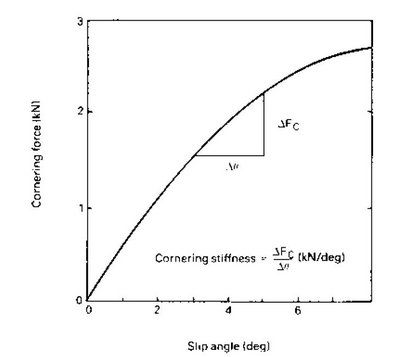
Diciamo due parole, invece, dei pneumatici. Bene: nel caso del modello “a bicicletta”, considereremo i pneumatici SOLO nella loro zona LINEARE. Ovvero (se riguardate il grafico col Carpet di deriva pubblicato nelle Faq precedenti) che ipotizziamo che le ruote assumano angoli di deriva piccoli, in modo da essere nella zona di sinistra del grafico, in cui Fy è direttamente proporzionale ad alfa e siamo lontani dal picco di forza laterale.
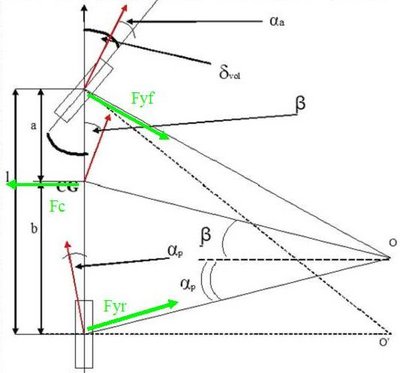
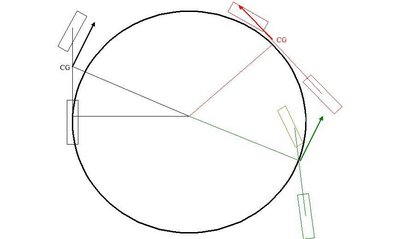
Ecco il modello bicicletta:
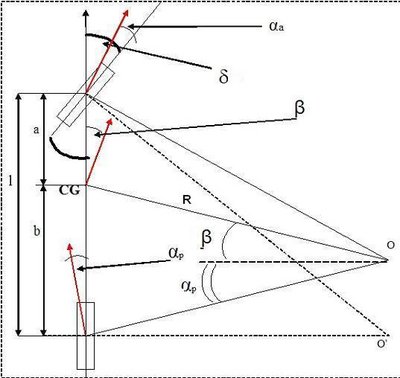
Supponiamo di essere in condizioni stabilizzate, ovvero di percorrere la curva a velocità costante, e analizziamo le sigle, partendo dalla ruota anteriore..
Con la lettera greca DELTA ho indicato l’angolo di sterzo. Questo è proprio l’angolo di cui ruota la mia ruota davanti quando giro il volante.
Mentre ALFA (α) è l’angolo di deriva, qui specificato sia per l’anteriore che per il posteriore, dato che siamo in condizioni reali e anche il posteriore ha un suo angolo di deriva.
Guardate la freccia rossa della ruota davanti (ma anche di quella dietro). L’angolo formato dalla velocità (freccia rossa) con l’asse della ruota E’ l’angolo di deriva. E considerate pure, guardando la ruota anteriore, che angolo di deriva e angolo sterzo NON sono la stessa cosa!
L’angolo di sterzo, in queste condizioni, è SEMPRE maggiore dell’angolo di deriva.
Poi c’è un’altra freccia rossa, posta nel baricentro (CG), che genera un angolo con l’asse vettura (della bicicletta). Allora, l’angolo, che indico con BETA (β) è l’angolo di assetto della bici (della vettura). Attenti bene a non confonderlo con l’assetto come lo conoscete voi….”quello” (di assetto) è l’assetto della vettura, ossia la posizione statica della vettura rispetto alla linea di terra (quello che comunemente viene indicata come “l’altezza” della macchina…. Infatti, una macchina “assettata” è, nel gergo comune, una macchina “abbassata”).
Qui, l’assetto è un’altra cosa: l’angolo di assetto è l’angolo formato dalla velocità (del baricentro!!!!), indicato dalla freccia rossa, con l’asse della vettura (che nel mio caso è la bicicletta). Guardate la figura: l’angolo di assetto BETA che ho disegnato è POSITIVO, perché è rivolto all’interno della curva.
Immaginate una macchina che sta facendo una curva “di traverso”, in derapata. In quel caso, pensate a come può essere l’angolo di assetto di quella vettura. L’angolo di assetto sarà rivolto verso l’esterno della curva perché il vettore velocità (rosso) è diretto verso l’esterno, fuori (e infatti la mia macchina è di traverso…) mentre l’asse di mezzeria della macchina “guarda” verso l’interno.
Abbiamo anche il passo, indicato con l minuscolo e i due semipassi anteriore e posteriore (a e b) che sono, in pratica la distanza del baricentro rispettivamente dall’asse anteriore e dall’asse posteriore. Chiaro che, se ho il baricentro (CG) spostato in avanti a sarà minore di b; e viceversa.
Infine, c’è il centro di istantanea rotazione O. Invero ho anche disegnato O’ perché ci servirà. E c’è, naturalmente, il raggio della curva R.
Con un po’ di trigonometria, mettiamo in relazione l’angolo di assetto β con gli angoli di deriva (αa e αp) e l’angolo di sterzo .
In pratica questo significa che devo prendere una parte del semipasso posteriore b.
Nota: Commettiamo un errore minimo a considerare R come il segmento O-CG e anche il segmento O-centro ruota posteriore (ma è appunto trascurabile ai fini della nostra spiegazione).
Quindi:
R sin (αp) = b – R sin (β)
R sin (αp) è quel “pezzo” di segmento che va dal centro ruota posteriore a CG, quindi un pezzo del semipasso posteriore b.
E poi (questa è più facile se guardate la figura):
R cos (αp) = R cos (β)
Quindi, diventa
Però,noi abbiamo detto che sia β, sia αp (cioè l’angolo di deriva posteriore) sono PICCOLI, cioè hanno valori PICCOLI.
Questo significa che:
- il seno di β, cioè sin(β), sarà asintotico a β;
- il coseno di β, cioè cos (β), sarà asintotico a 1;
- la tangente di α, essendo null’altro che il rapporto tra seno e coseno, sarà asintotico al rapporto tra α e 1. Quindi, varrà α.
Allora la formula qui sopra diventerà:
b/R – Rβ/R ~ αp
Quindi, semplificando R nel secondo termine:
b/R – β ~ αp
Che, scritto meglio diventa:
Adesso, possiamo fare lo stesso discorso per l’anteriore, trovando la relazione che ci permette di “collegare” l’angolo di sterzo () con gli angoli di deriva anteriore e posteriore.
Evitiamo i conti (se volete divertirvi, fatelo voi per esercizio) e passiamo subito al risultato.
Queste due formule, che adesso andiamo a vedere, devono essere stampate nella vostra testa!
La prima formula dice che l'assetto, cioè quanto il muso della macchina punta all'interno o all'esterno della curva, dipende SOLO da una costante, che è b/R, e dall'angolo di deriva del posteriore. Ossia, il fatto che la macchina "assetti", cioè si disponga poco o tanto "di traverso" (in condizioni stabilizzate!!!!) dipende solo DAL POSTERIORE. Quindi, potete fare tutto quello che volete al vostro avantreno (per esempio, cambiare le gomme, cambiare la convergenza, il camber o quel che volete voi) ma il comportamento della vostra macchina NON cambierà per niente. Dovete intervenire sul posteriore.
Ossia, se durante la curva la vostra macchina si dispone tanto o poco di traverso, cioè rivolge il muso (durante tutto l'arco della curva) dentro o fuori la traiettoria, verso il centro della traiettoria o verso l'esterno, questo dipende SOLO dal posteriore.
La seconda formula mi dice che la quantità di sterzo necessaria per compiere la curva, cioè "quanto" devo girare il volante, dipende (a meno, anche qui da un coefficiente) dal rapporto tra avantreno e retrotreno.
Un paio di riflessioni:
- In condizioni cinematiche, l'angolo di sterzo dipende solo da parametri geometrici (e mi sembra ragionevole...);
- per opportuni valori di deriva anteriore e posteriore potrei avere che, in condizioni stabilizzate, percorro una curva di raggio R con angolo di sterzo nullo (a ruote dritte...);
- al limite, se deriva posteriore >> deriva anteriore, per percorrere la stessa curva di raggio R mi serve un angolo di sterzo negativo (sterzo verso l'esterno) e anche l'angolo di assetto sarà negativo (macchina che punta verso l'esterno). Ma in questo caso siamo fuori dall'ipotesi iniziale di angoli di deriva piccoli...quindi le approssimazioni che abbiamo fatto potrebbero non essere più valide.
A questo punto, facciamo una breve considerazione sui sistemi di riferimento e introduciamo una nuova grandezza.
Per convenzione, si utilizzano TRE sistemi di riferimento distinti:
- Il primo è, come sempre, quello INERZIALE: tre assi, XYZ, fissi;
- Il secondo è il sistema di “assi corpo”, ossia un sistema xyz (una terna cartesiana) “relativo”, detto anche “assi veicolo” fissato alla scocca della macchina che si muove con esso;
- Il terzo, un sistema di riferimento, x’ y’ z’ detto “assi corpo ausiliario”, che si muove con la macchina.
A questo punto, possiamo RI-definire tutti i nostri parametri, e aggiungerne uno nuovo:
1) Ay, l’accelerazione laterale: è la componente del vettore accelerazione del veicolo applicata in CG e parallela alla direzione y’ del sistema ausiliario;
2) β, angolo di assetto: l’angolo (l’angolo, non il vettore) tra il vettore velocità di CG e l’asse x’ (o x perché coincidono in questo caso);
3) La grandezza nuova, che è chiamata angolo di IMBARDATA, è l’angolo formato dall’asse X della terna inerziale e l’angolo x’ della terna di “appoggio” (“ausiliaria”). Si indica con PSI ()
Naturalmente, la variazione di quest’angolo nel tempo, prende il nome di VELOCITA’ d’imbardata (d/dt) e si indica con ’.
Vediamo di chiarire “intuitivamente” cosa siano assetto e imbardata (sempre nella speranza che nessun esperto di dinamica del veicolo passi di qui e legga quanto sto per scrivere) in modo che possiate capire. Per chiarirvi un po’ le idee, direi di rifarci “alle stelle e ai pianeti”: pensate alla terra, che ruota attorno al sole. Supponente che il moto attorno al sole sia circolare (anche se non lo è…). Oltre a girare intorno al sole (per fare 1 giro completo ci mette un po’ più di 1 anno), la terra ruota intorno al suo asse (per fare 1 giro completo ci mette 1 giorno). Allora, la velocità d’imbardata è un po’ come la velocità di rotazione (1 giorno); la velocità di assetto è un po’ come la velocità di rivoluzione (1 anno).
Vi ricordate quando vi dicevo che:
“Vedete anche che il CG non è perfettamente al centro della macchina (ossia, è spostato in avanti). Ciò significa che la distribuzione dei pesi è spostata verso l’asse anteriore.
Allora, diciamo che la forza laterale TOTALE generata dai pneumatici anteriori e posteriori, cioè la SOMMA delle due forze Ff e Fr, deve EGUAGLIARE le forza F centrifuga che agisce sul CG. Mi sembra chiaro, no? Quindi, la posizione spostata n aveanti o all’indietro del CG determina la distribuzione delle forze tra anteriore e posteriore e, di conseguenza, sempre in proporzione, la quantità di “cornering force”, cioè di forza trasversale, che i rispettivi pneumatici (anteriori e posteriori) devono generare se vogliamo che la macchina stia in strada (o, meglio, sulla traiettoria impostata). Anche questo fatto, mi sembra chiaro, no?..........” (con disegno allegato) (VOL. 5 - Cornering force)?
Non l’ho messo lì mica per niente. L’ho messo perché sapevo che poi lo avremmo usato.
Ecco, è venuto il momento di usarlo. Riprendiamo dunque il nostro disegno e aggiungiamogli le forze: CENTRIFUGA (Fc), DI ADERENZA ANTERIORE (Fyf) e POSTERIORE (Fyr).
Come sempre, visto che gli angoli sono piccoli, avremo che il seno dell’angolo è asintotico all’angolo stesso; il coseno dell’angolo è asintotico a 1.
Facciamo l’equilibrio in direzione laterale Fy.
Dovrà essere che le forze esercitate dai pneumatici anteriore e posteriore dovranno equilibrare la forza centrifuga Fc.
La forza centrifuga Fc vale:
che posso anche scrivere come:
Fc = m * (’)2 * R
Quindi:
Fc = Fyf + Fyr
Poi facciamo l’equilibrio attorno al centro di gravità. Cosa vuol dire? Significa che NON HO VELOCITA’ DI IMBARDATA.
Se non avessi questo equilibrio, significherebbe che la macchina RUOTA ATTORNO AL SUO ASSE VERTICALE (che so, parte in testacoda, per esempio, se la forza Fyr moltiplicata per il braccio b è minore di quella anteriore Fyf moltiplicata per a).
Quindi il momento intorno a z
Mz = (Fyf) * a – (Fyr) * b = 0 (guardate sempre il disegno con le forze colorate di verde)
Se metto insieme tutte queste equazioni, cioè se le risolvo, ottengo:

Dove Mf e Mr sono le ripartizioni di peso all'anteriore e al posteriore. Ossia, quanto del peso totale della macchina (della bici) compete all'asse anteriore e quanto al posteriore.
Ricordiamo che Fy, la forza trasversale generata dai pneumatici è il prodotto di un coefficiente, la rigidezza di deriva (C), per l'angolo di deriva del pneumatico α:
Fy = C α
Quindi la mia α (deriva) diventa per il posteriore:
e per l’anteriore:
Ora, se aggiungo queste relazioni alle formule precedenti, avrò:
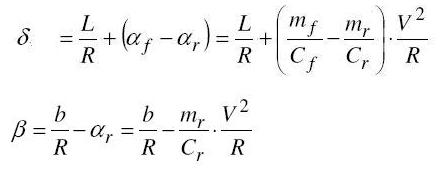
Abbiamo legato l'angolo di cui ruota la ruota anteriore con l'angolo di deriva (anteriore e posteriore) e con l'accelerazione trasversale Ay; e l'angolo di assetto con l'angolo di deriva posteriore e con l'accelerazione trasversale Ay (Ay è una sola, eh).
Ma a noi, dell'angolo di cui ruota la ruota anteriore interessa relativamente. ci interessa di più "di quanto devo girare il volante", ossia l'angolo di sterzo.
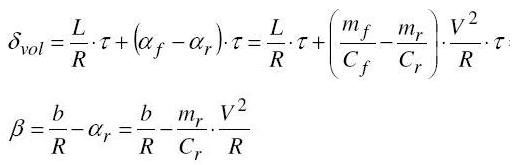
Quindi, dovrò moltiplicate tutto per il mio rapporto di sterzo TAU ().
Se lo faccio, la formula dell'angolo di sterzo diventa quella scritta qui sotto. mentre per l'angolo di assetto non cambia nulla:
Se pongo:
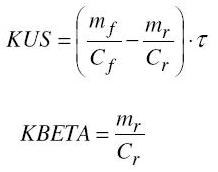
Otterrò allora la madre di tutte le formule della dinamica del veicolo!
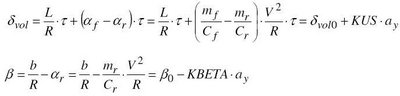
Queste formule son da imparare a memoria!
Adesso vediamo che cosa vogliono dire:
- il termine KBETA prende il nome di GRADIENTE DI ASSETTO;
- il termine KUS prende il nome di GRADIENTE DI SOTTOSTERZO.
Entrambi si misurano in RAD/(m/sec2).
- 0 e β0 sono i e β cinematici.
Per il momento, noi andremo a vedere il comportamento della bicicletta (dell'auto) nella zona di funzionamento LINEARE del pneumatico.
Come vedete, l'angolo di assetto β è la somma di due contributi: una costante b/R (semipasso posteriore diviso R) e una funzione lineare di Ay.
b/R prende il nome di assetto cinematico. ossia di angolo di assetto che la mia bici (ma possiamo parlare di macchina, se volete) assume quando l'accelerazione Ay è nulla, ossia quando vado talmente piano che non ho forza centrifuga (in pratica, quando sono fermo). Se osservate il disegno (del modello a bicicletta con le forze in verde) postato in precedenza, è "l'angolo di deriva di CG" quando vado pianissimo (al limite, quando sono fermo): per farla breve, tiro il segmento che congiunge O' con CG e poi traccio la perpendicolare a quel segmento. L'angolo tra l'asse della bici e la perpendicolare è il mio β0.
Vuol dire che, in condizioni cinematiche, più b è grande (quindi, o l'auto è lunga o il mio CG è spostato in avanti) più il mio assetto sarà elevato (ossia, più il muso dell'auto punterà, sempre in condizioni stabilizzate, verso l'esterno); più R è grande, MENO tutto ciò avverrà. Se volete, se vi è più facile, potete leggerlo come una condizione di sottosterzo: non è corretto ma vi serve per capire.
Al generarsi di una velocità diversa da 0 o, quantomeno, non piccolissima, nasce un'accelerazione Ay. Quindi, il mio dipenderà dal Ay moltiplicato per KBETA.
KBETA, a sua volta, dipende SOLO E UNICAMENTE dal posteriore: massa e rigidezza di deriva del posteriore, e basta.
Cosa vuol dire? Vuol dire che l'assetto, ossia come si dispone la macchina in curva, dipende solo e unicamente dal retrotreno.
Osserviamo queste tre condizioni, per farvi capire.
In NERO, la condizione CINEMATICA. Come vedete, non ci sono derive e la direzione della velocità della ruota posteriore è perpendicolare al segmento che unisce il centro di istantanea rotazione O con la ruota dietro. in condizioni cinematiche, Ay vale 0. l'angolo di assetto β (deriva del CG) ha un certo valore, il valore β0, pari a b/R. Il muso dell'auto è in fuori (assetto positivo).
Poi, quando comincio a muovermi, la mia Ay compare e il mio centro O comincia a spostarsi verso CG. Man mano che Ay cresce, O si sposta fino a mettersi "alla stessa altezza" di CG.
In ROSSO, la condizione in cui CG e O sono alla stessa altezza. In questo caso, l’angolo di assetto β (deriva di CG) vale 0.
Vorrei sapere, da voi, a quale velocità V corrisponde questa condizione. la mia macchina (bicicletta) comunque, è perpendicolare alla traiettoria.
In VERDE, il centro di istantanea rotazione O sta "più in alto" di CG. In questo caso, assumerà valori NEGATIVI. ATTENTI BENE: sono sempre in condizioni stazionarie e di equilibrio, ossia, non sto andando in testacoda! Ma ad ogni modo sto facendo la curva con il muso dell'auto che guarda verso l'interno della curva.
Tutto ciò, fino a quando arrivo a NON avere deriva sull'asse anteriore (ossia, O si pone all'altezza del centro ruota anteriore). naturalmente, in questo caso, la mia macchina (bici) starà TUTTA oltre il cerchio di raggio R. Oltre questo limite, inizio il controsterzo.
Perciò, il comportamento (stazionario) dell'auto durante la curva dipende da β, cioè dall'asse posteriore.
β è infatti funzione di una costante e di un coefficiente (KBETA) moltiplicato per Ay.
Ho detto che la prova che faccio è lo steering pad.
Al crescere di Ay, come varia BETA?
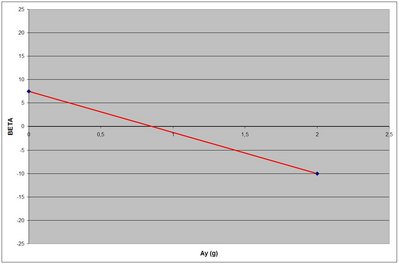
Valutiamolo con il grafico sottostante (i numeri sono inventati, è importante il concetto):
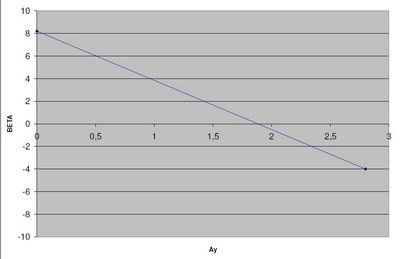
Come vedete, zero vale un po' più di 8 e corrisponde ad Ay=0. quindi è il rapporto b/R ed è l'intersezione con l'asse delle ordinate.
β si annulla per un valore di Ay pari a circa 1,8 g (Ay l'ho messo in g). In pratica è l'intersezione con l'asse delle ascisse
R non c'è. mi sembra ovvio: c'è Ay che dipende da R attraverso V (meglio: V2)
Come cambierebbe la retta se cambiassi R? Semplice: R compare "solo" in βzero, quindi cambiando R la retta trasla su o giù, ma non cambia pendenza; cambia di conseguenza anche il punto in cui interseca l'asse delle ascisse
Torniamo un attimo alla fig. 18.
Mi sembra chiaro che tutto quello che abbiamo detto riguardo lo spostamento di O (centro di istantanea rotazione) verso CG e oltre (cioè oltrepassarlo), dipenda dal fatto che, nel momento in cui mi muovo (comincio a prendere velocità), nascono DERIVE; e che sono le derive le responsabili del cambiamento di posizione di O. Quindi, il centro di istantanea rotazione O si sposta rispetto alla condizione cinematica solo in virtù della presenza delle derive!
Quanto alla posizione di CG, io ho disegnato un CG un po' spostato in avanti (per il momento, dove mettiamo CG non importa. Avrei fatto meglio a mettere CG perfettamente in mezzo tra l'asse anteriore e quello posteriore, per evitare fraintendimenti. ma sappiate che, per il momento, non importa dove sta CG).
Inoltre, la condizione in cui β è uguale a 0, cioè la velocità del baricentro CG coincide con l'asse della bicicletta (della vettura) è quella in cui β si annulla.
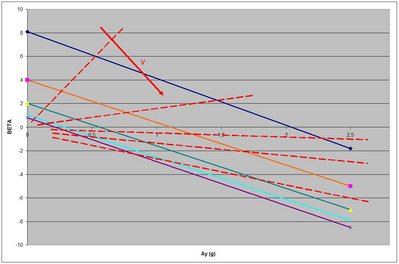
Guardate questo grafico adesso:
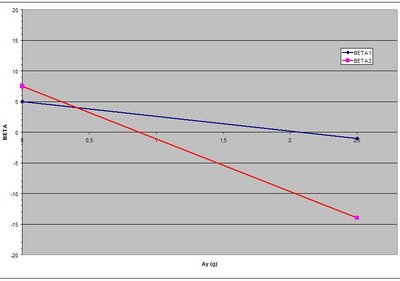
Supponiamo che le due curve qui disegnate siano rappresentative di 2 vetture che hanno lo stesso passo (cioè l è uguale per entrambe). Però, una delle due ha il CG (baricentro) più spostato in avanti dell’altra, quindi i valori di b e di a (cioè i semipassi anteriore e posteriore) differenti (facciamo finta che una abbia un motore 4 cilindri e l’altra ha un motore 6 cilindri in linea….. qualcosa che mi fa cambiare la posizione di CG insomma).
Naturalmente, supponiamo che stiano percorrendo lo stesso steering pad.
Ora rispondete a queste domande:
1- Quale delle due vetture ha il baricentro più spostato in avanti?
2- Quale delle due ha le gomme più grosse sul retrotreno (ossia, le più performanti; che, in genere, coincide con quelle più larghe)? (Guardate che è una domanda che, volutamente, vi trae in inganno….rispondete facendo un ragionamento….DUE possono essere le risposte (almeno a livello teorico, perché poi, se si guarda bene il grafico….)
3- Infine, quale delle due ha più “appoggio” al posteriore? (Questa è invece una domanda con una sola possibilità di risposta)
Risposte:
1- ho detto che le due macchine sono uguali in tutto tranne che per qualcosa che mi fa cambiare la posizione del baricentro. quindi hanno uguale il peso TOTALE (ma non la ripartizione di peso) e il passo (che abbiamo indicato con l).
ora, β abbiamo detto essere uguale a β0 - KBETA*Ay
β0 vale b/R
e KBETA vale Mr/Cr ossia il rapporto tra il peso che grava sul posteriore e la rigidezza di deriva del posteriore.
Se guardo le due figure vedo che quello che ha il β0 maggiore, ossia il b maggiore, è la curva ROSSA. che è anche quella più pendente, ossia quella che ha il maggiore Mr/Cr.
Però, io il baricentro lo misuro in condizioni statiche... Vi ricordate come varia la rigidezza di deriva in funzione della forza peso (meglio sarebbe dire forza normale al pneumatico)? (*)
2- se dovessimo ragionare per assurdo, ossia supponessimo che Mr fosse uguale per le due auto (per semplicità) allora potremmo dire che quella con la minor pendenza è quella con la maggiore rigidezza di deriva (quindi, con le gomme più "larghe"). Altrimenti, anche in questo caso, dobbiamo considerare la domanda qui sopra: conoscete come varia C in funzione di Fz? (*)
3- quella blu. perchè "sopporta" maggiori accelerazioni trasversali per avere assetti nulli o, peggio, negativi.
Per appoggio s'intende la sensazione di "tenuta" del posteriore, di capacità di assorbire i carichi laterali, di accettare un elevato impegno (trasversale) della vettur. in pratica, è la sensazione di vettura "sicura", stabile: è difficile che perda aderenza al posteriore.
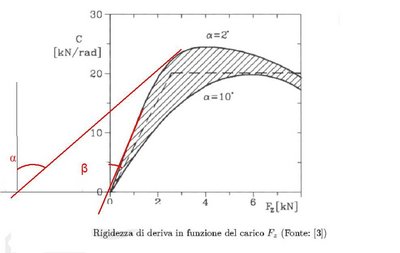
(*) Guardate qui sotto e considerate la curva per α = 2 perchè è più semplice da capire.
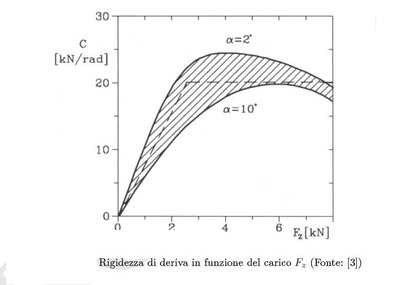
insomma, come per il caso di Fy, anche nel caso della rigidezza di deriva, si ha prima una crescita (più o meno lineare) e poi la tendenza a saturare. nel senso che, se continuo a far aumentare il peso sulla mia ruota, la rigidezza di deriva non aumenta SEMPRE e in proporzione, ma prima o poi la smette di aumentare (satura, appunto!). cresce, cresce, cresce e poi cresce un po' meno; poi sempre meno, e così via...come descritto in questo grafico.
L'avevamo detto, no? Beh, ricordatevelo bene, perchè ci servirà tra poco.
Ora, supponiamo di dividere Fz per g (9,807... m/s2): cosa otteniamo?
Otteniamo M, cioè la massa gravante sulla ruota.
Adesso, Mr/Cr cos'è?
E’ la pendenza della ia curva C-Fz del grafico riportato prima MA RISPETTO ALL'ASSE DELLE Y (cioè di Fz)!!!!!!
Quindi, avere un rapporto Mr/Cr maggiore, cosa vuol dire? Osservate sotto:
vuol dire che se il mio rapporto Mr/Cr della macchina 1 è > del rapporto Mr/Cr della macchina 2, allora sono nella zona più alta della curva descritta prima, quindi.....PIU' VICINO AL LIMITE!!!!!!!!
Se Mr/Cr è più basso significa che (ammesso che Mr sia costante) ho una maggiore rigidezza di deriva, ossia ho più da spendere.....
ECCO COME VANNO INTESI Mr/Cr (e, come vedremo in seguito, Mf/Cf), ossia, VANNO VISTI NEL COMPLESSO e non COME COSE SEPARATE (Mr E Cr DISTINTI...).
Quindi, per tornare alle domande poste sopra, la curva blu, meno pendente, è quella che ha il più basso rapporto Mr/Cr, quindi più appoggio, infatti, si annulla più avanti come Ay.
Ed ecco quindi che le risposte definitive alle 3 domande iniziali sono:
1) la posizione del baricentro, in tutti i corpi, è una sola. E la posizione del baricentro si determina forse in condizioni statiche.
E allora il mio β0 (assetto cinematico) non è forse il valore di β in condizioni praticamente STATICHE?
E, siccome β0 = b/R, allora supponendo R uguale in entrambi i casi, avrò che la macchina che ha il valore di b maggiore (quindi di β0 maggiore) è quella che ha il semipasso posteriore maggiore, quindi la posizione di CG più avanzata. Quindi, la retta ROSSA.
2)Qui, potevate seguire 2 strade.
La prima, più semplice e “facile”, supponendo che ripartizione dei pesi al posteriore non fosse troppo dissimile (d’altronde, i valori di β0 delle due auto non sono troppo diversi…quindi, i semipassi posteriori non sono troppo differenti). Siccome il valore di β, gradiente di assetto, E’ la pendenza della curva di assetto, e che β vale Mr/Cr (ossia il rapporto tra la massa sull’asse e la rigidezza di deriva dell’asse); supponendo che Mr sia uguale in entrambi i casi, la macchina che avrà Cr maggiore avrà, di conseguenza, il β minore ossia la pendenza minore (in valore assoluto, eh; perché poi ci sta il segno negativo davanti). Quindi, la retta BLU.
La seconda, meno semplice e intuitiva, passa per il discorso della rigidezza di deriva del pneumatico in funzione del carico perpendicolare al piano d’appoggio del pneumatico stesso. Diciamo subito che, poiché noi supponiamo di essere su una strada piana, il carico perpendicolare al piano d’appoggio del pneumatico coincide, nel nostro caso, col peso che grava sul pneumatico (cioè, quella parte del peso della macchina che gli grava sopra).
Allora, ho postato io il grafico Fz-C. Come vedete, tale curva è molto simile alla curva Fy-α (cioè forza trasversale - angolo di deriva) del pneumatico, che ben conoscete: una prima (breve) parte rettilinea, poi la perdita di linearità, fino alla saturazione e al calo. Praticamente lo stesso andamento. Solo che qui, invece di avere sulle ascisse α e sulle ordinate Fy, abbiamo sulle ascisse Fz (la forza normale) e sulle ordinate C (la rigidezza di deriva).
Ora, come sapete, Fz cioè il peso, vale Mg, cioè la massa moltiplicata per l’accelerazione di gravità.
Cioè Fz = Mg
Adesso, se divido Mg per g, ossia Mg/g, ottengo M.
Quindi:
Fz/g = Mg/g = M
In pratica, se divido per g (accelerazione di gravità = a circa 9,807 m/s2), il mio grafico NON cambia affatto il proprio aspetto. Semplicemente, riscalo l’asse delle ordinate. E tutto vale come prima.
Quindi, quello che prima era il coefficiente angolare in un punto della mia curva, cioè C/Fz, adesso, rimane sempre il coefficiente angolare della mia curva (sempre in quel punto), seppure numericamente diverso, perché c’è un ordine di grandezza (9,807) di differenza…ma diventa C/M; che, nel nostro caso è C/Mr perché stiamo parlando del retrotreno. Attenti: è il coefficiente angolare della curva RISPETTO ALL’ASSE DELLE ASCISSE!!!!!
Ma C/M non è forse l’inverso di M/C? e Mr/C non è forse il mio β (a meno di Ay)? E non è forse ANCHE il coefficiente angolare della mia curva MA STAVOLTA RISPETTO ALL’ASSE DELLE ORDINATE?
Allora, invece di andare a vedere quanto era la mia massa in entrambe le vetture (ragionamento 1), non facevo prima a vedere quanto era la pendenza delle 2 curve?
Andate a vedere il grafico coi due coefficienti angolari (α e β) che ho disegnati RISPETTO ALL’ASSE DELLE ORDINATE (Y): vedrete che il punto di Mr/C (pendenza) più basso (corrispondente a β) è quello dove ho “più margine”, “più tenuta”; mentre quello dove è più alto (corrispondente a α) sono già nella zona di quasi saturazione. Quindi, sarò più vicino al limite.
Ora, quello dove è più basso, dove ho più margine di tenuta, è quello corrispondente, dunque, a quello della curva BLU!!!!
(e, infatti, come vedete, nel caso della curva blu ho bisogno di meno angolo di assetto, e quindi di meno angolo di deriva del posteriore, per “sostenere” la medesima Ay. Insomma, a pari Ay la macchina BLU si mette meno di traverso…..)
3) in conseguenza di quello che abbiamo detto fino ad ora, è la macchina BLU che ha il maggiore appoggio.
Facciamo un altro passo avanti. Guardate la figura qui sotto.
Abbiamo visto che, se faccio una curva di raggio differente, cioè se varia R, la curva di assetto (β = l/R – Mr/Cr * Ay) si sposta in su (se il raggio diminuisce) o in giù verso l’origine degli assi (se R aumenta).
Mi sembra chiaro che il valore di “assetto cinematico” (l/R) NON possa essere 0 (zero) perché significherebbe che NON sto facendo una curva ma sto andando dritto. Al limite, potrà assumere un valore bassissimo (al limite prossimo allo zero; ma non zero), il che significherebbe che sto facendo una curva di raggio amplissimo….ma non zero.
Questa considerazione è la traduzione alla “parla come mangi” di una ben precisa formulazione di analisi matematica, che recita che la funzione l/R tende ad assumere il valore 0 (zero) (ho detto TENDE, mica ASSUME) quando R tende ad assumere un valore sempre più grande (al limite, infinito…che corrisponde alla condizione di marcia rettilinea). E’ la teoria dei limiti di funzione.
Nel grafico, vedete bene le differenti curve (che poi sono rette, per ora) di assetto. Vedete che traslano in su o in giù. Quello che non cambia, invece, è la pendenza delle rette.
La pendenza delle rette dipende infatti dalla….rigidezza di deriva dell’asse (posteriore).
Attenti, ho detto rigidezza di deriva dell’asse e non della (delle) ruota (ruote) perché nelle formula compare non solo Cr (rigidezza di deriva del pneumatico) ma anche la forza normale al pneumatico (= la quota di peso????) posteriore e l’accelerazione trasversale Ay (a sua volta funzione della velocità V e del raggio R).
Ora, se voglio proprio essere corretto, devo dire che la forza normale al pneumatico NON è rappresentata solo dalla forza peso che compete all’asse posteriore, ma pure dal trasferimento di carico (che dipende dall’altezza del baricentro e dalla carreggiata) e dalle rigidezze della sospensione. Insomma, la forza normale al pneumatico altro non è se non la forza scambiata tra pneumatico e strada in direzione NORMALE al terreno. Capito?
Chiaramente, a basse accelerazioni trasversali possiamo tranquillamente considerare solo il peso…
Bene, chiarito questo punto, andiamo avanti.
Abbiamo dunque visto cosa succede se vario R, il raggio della traiettoria. E la cosa vi è apparsa facile perché siete riusciti a immaginarvela, a descriverla nella vostra mente.
Ma…..se vario V, la velocità?
Cosa vuol dire variare V?
Ve lo dico io: è l’equivalente di sterzare (di più o di meno) mentre sto curvando.
Per farvi capire cosa succede, ho tirato delle rette rosse tratteggiate. Rappresentano quello che vi dicevo: mentre viaggio a velocità costante, giro il volante. In pratica, è l’equivalente di accelerare o rallentare tenendo il volante fermo.
Sono segmenti a iso-velocità. E la velocità con cui si muove la macchina cresce nel senso indicato dalla freccia rossa. Ossia, la prima retta (quella inclinata di più) corrisponde ad una velocità di percorrenza della curva INFERIORE rispetto, che so, al segmento successivo o a quello dopo ancora. Insomma, guardate la freccia rossa: i segmenti cambiano inclinazione al crescere della velocità.
Bene: consideriamo uno di questi segmenti tratteggiati. Per esempio, il primo. Significa che:
sto facendo la curva a una certa velocità (corrispondente a quel segmento), piuttosto bassa. Comincio a girare il volante. Per andare su valori di assetto elevati, devo crescere con l’accelerazione trasversale Ay. guardate il grafico: per passare dalla curva di assetto azzurra a quella blu (muovendomi lungo il segmento tratteggiato rosso), devo girare il volante di un certo angolo (e far crescere Ay).
Se, invece, sono ad una velocità differente (comunque maggiore di prima), mi trovo su un altro segmento tratteggiato, corrispondente alla mia differente velocità V. Diciamo il secondo segmento. Per passare dalla curva di assetto azzurra a quella blu, corrispondente al medesimo raggio R di prima, dovrò girare il volante dello stesso angolo. Ma la mia Ay crescerà di parecchio, MOLTO PIU’ di prima. Significa che, a pari angolo volante che giro, se vado più veloce, avrò accelerazioni ben maggiori!!!
Proprio questo è il punto: questo grafico vi mostra come varia la curva di assetto al variare della velocità.
In pratica, se accelero, e non giro il volante (il problema del volante lo vedremo tra poco), ammesso di accelerare lentamente da evitare il trasferimento di carico longitudinale etc etc (tutto quello che abbiamo detto), mi porto su livelli di Ay maggiori, a pari R. Quindi, in pratica, se sono sulla curva di assetto arancione, mi sposto lunga la curva di assetto arancione. e basta.
Questo significa che, per equilibrare la maggiore Ay, cioè la maggiore forza trasversale, siccome la reazione la faccio col pneumatico, DEVO dare un angolo di deriva dell'asse posteriore MAGGIORE, che corrisponde a un maggiore angolo di assetto ().
Quando abbiamo iniziato a parlare della madre di tutte le formule della dinamica del veicolo, se vi ricordate, abbiamo fatto l’ipotesi (tra le altre) che avremmo guardato il comportamento di avantreno e retrotreno SOLO fin dove il pneumatico mantiene un comportamento lineare. Questo significa che, come sappiamo ormai bene, stiamo al di sotto di 0,4g (ossia circa 4 m/s2) di accelerazione trasversale (Ay). Ossia, detto in altre parole, la nostra accelerazione trasversale NON deve superare gli 0,4g. in pratica, se vado a prendere il mio grafico Fy-α che lega la forza trasversale che il pneumatico è in grado di generare in funzione dell’angolo di deriva, significa che mi tengo nella zona in cui la curva si mantiene rettilinea.
Bene. rimuoviamo questa ipotesi e vediamo cosa succede se vado oltre gli 0,4g.
Non considerate cosa succede all’avantreno (lo vedremo più avanti): concentratevi solo sul retrotreno.
Prendete la vostra curva di assetto, per esempio quella che allego qui sotto.
Adesso è rettilinea. Attenti bene: la curva di assetto lega il β in funzione della Ay che raggiunge la macchina (la bicicletta, nel nostro caso), o meglio il retrotreno che, come abbiamo detto, risente del tipo di pneumatici, delle forze che agiscono sul pneumatico (che a loro volta dipendono dalla rigidezza delle sospensioni, dal trasferimento di carico, etc etc ivi comprese eventuali forze di trazione nel caso noi parlassimo di vetture a TP) attraverso la formula che ben conoscete (una delle 2 formule che sono la “madre di tutte le formule”):
= l/R – (Mr/Cr)*Ay.
Invece, nel grafico forza-deriva, la forza generata dal pneumatico Fy è funzione solamente dell’angolo di deriva.
Bene. come vedete dalla curva di assetto, questa si mantiene rettilinea fino a circa 2g di Ay.
Questo significa che le caratteristiche del retrotreno della mia macchina (tipo di pneumatici usati, eventuali ripartizioni di barra, forze normali che agiscono sul pneumatico etc) mi consente di far lavorare le gomme che ho scelte, la cui caratteristica potrebbe essere quella che vi allego qui sotto, nel tratto rettilineo della loro curva Fy-α. Ossia, sempre riferendoci al grafico qui sotto, diciamo fino a circa 4 gradi di angolo di deriva α.
Tanto per chiarirvi il concetto (guardate il grafico precedente a questo): la macchina si sta muovendo (su una traiettoria circolare) in modo tale che il valore di β che il CG (baricentro) assume è pari a -10 gradi a 2g di accelerazione trasversale. Significa che la velocità V del baricentro CG sarà tale da formare con l’asse vettura un angolo di 10 gradi verso l’esterno.
A questo valore di β corrisponde un certo valore di deriva dell’asse posteriore (α) (che dipende dal semipasso posteriore, dal raggio di curvatura, etc) che, presumibilmente, sarà al massimo di 4 gradi, considerato che i pneumatici montati sono quelli corrispondenti al grafico qui sotto e che ho detto che siamo nella zona rettilinea.
Se continuo ad accelerare, vedo che al crescere di ALFA la mia forza Fy generata dal pneumatico NON è più proporzionale ma comincia a scostarsi dalla proporzionalità (guarda il grafico Fy-α del pneumatico). quindi, avrò bisogno di più angolo β (per avere più angolo α posteriore).
La curva piega quindi verso il basso per le ragioni su esposte.
Dunque, avrà una forma come quella disegnata qui sotto (per esempio, la curva indicata con 1):
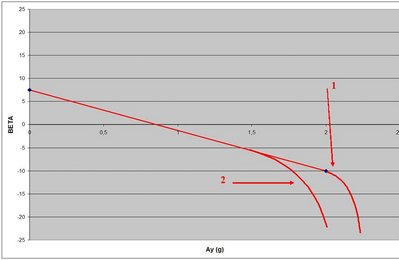
Adesso, se lavoraste per fare la messa a punto di una macchina che poi dovrà andare in serie, preferireste che la vostra curva di assetto facesse come la curva 1, oppure come la curva 2? Perché?
Risposta: Di serie la 2, da gara la 1.
La 2 inizia prima e più progressivamente ad assettarsi e quindi comunica prima che si sta arrivando al limite, ma ha un limite più basso.
Per ottenere l’una e l’altra, i parametri su cui lavorare sono:
- Tipologia di pneumatico;
- Peso sull'asse posteriore;
- Trasferimento di carico.
Steering pad.
Facciamo un brevissimo excursus sulla prova pratica che traduce il concetto di fare una curva in condizioni stabilizzate.
Ci si pone su uno "steering pad", che è semplicemente un piazzale piano molto ampio su cui posso mettermi a percorrere una traiettoria circolare (di raggio R).
Generalmente, fino a poco tempo fa, erano 2 i raggi R che si consideravano: uno di 40 metri, l'altro di 100 metri (oggi si fanno prove differenti, ma noi non interessa entrarvi più di tanto nel merito).
il concetto è quello di tenermi sulla traiettoria di raggio R e percorrerla in condizioni stabilizzate e poi di far crescere la mia AY semplicemente modificando la mia velocità longitudinale V (per ottemperare alla famosa formula Ay = V2 / R).
Così "spazzolerò" tutti i valori di Ay, da 0 fino al massimo Ay che può raggiungere la mia macchina.
In pratica, come si fa?
Semplice, mi metto con la giusta marcia (di solito in II o in III, dipende da che raggio R devo percorrere, se 40 o 100 m; e dalle prestazioni che la mia macchina è in grado di fornire... Comunque, nel 99,99% dei casi, le marce sono quelle) e, partendo dalla minima velocità di sostentamento del motore (cioè, per esempio, in II mollo la frizione e lasci trascinare il motore. questa è la condizione di trascinamento...), incomincio a percorrere la mia traiettoria. Faccio un giro e poi incomincio ad accelerare LENTAMENTE in modo cioè che la mia accelerazione longitudinale rimanga trascurabile. E’ chiaro che, al crescere della velocità, cresce anche Ay e quindi, se voglio rimanere in traiettoria (DEVO rimanere in traiettoria se voglio fare bene la prova) sarò costretto a girare di più il volante. E così via: vado più veloce, cresce Ay, do più angolo volante... Fino a quando non riuscirò più a tenere la macchina sulla traiettoria (o perché scivola col muso o perché parte di coda).
Chiaramente, durante tutta la prova, vengono acquisiti tutti i parametri che mi servono (Ay, velocità, angolo volante, β, , β', ’, - theta -, ’, etc) attraverso accelerometri, sensori GPS e piattaforme giroscopiche stabilizzate.
Le prove, più di una per avere una buona precisione statistica, vanno eseguite in un senso e nell'altro (girando a dx e a sx).
:grazie) alfistavero
Consideriamo, per ora, il solo caso cinematico. Poi, aggiungeremo le complicazioni andando verso il caso reale. Osservate la figura seguente:
Come ormai dovreste (ben) sapere, per avere una sterzatura cinematicamente perfetta la ruota destra e quella sinistra devono sterzare con due differenti angoli. Per la precisione, la ruota interna, per avere correttezza cinematica, deve sterzare di più. Questo perché, in pratica, la mia macchina deve ruotare attorno ad UNO (e uno solo) centro di istantanea rotazione che, nel nostro caso, è il punto C. il punto C è facilmente determinabile: è chiaro che deve stare sulla retta perpendicolare all’asse posteriore (perché, come sappiamo, traccio la retta perpendicolare alla velocità, all’atto di moto, delle mie ruote; insomma, è la stessa metodologia usata per determinare il centro di istantanea rotazione della sospensione per la definizione del centro di rollio…); inoltre, deve stare anche sulla retta perpendicolare all’asse della ruota esterna (la retta A-C). Quindi, la ruota interna dovrà essere più sterzata affinché anche la retta perpendicolare al suo asse possa intersecarsi in C.
C è il centro di istantanea rotazione, cioè il centro attorno a cui ruota la macchina quando faccio la curva. Perciò, la mia ruota interna formerà un angolo, rispetto all’asse posteriore (quello indicato in figura con la lettera greca gamma γ), differente rispetto a quello (indicato in figura con la lettera greca alfa α) formato dalla ruota esterna.
Ripeto: per avere una sterzatura cinematicamente corretta, γ e α devono essere differenti. Nella realtà, però, questo NON avviene quasi mai. Anzi, al limite, su alcune macchine (poi vedremo quali), le ruota destra e quella sinistra sterzano dello stesso angolo (e, infatti, io ho disegnato un angolo α anche alla ruota interna). Diciamo comunque che, in linea di massima, l’angolo varierà tra i due estremi: da una parte il valore γ, corrispondente alla sterzatura cinematicamente corretta; dall’altro, il valore α, corrispondente alla sterzatura della ruota interna UGUALE a quella della ruota esterna. Ora, l’angolo β che indica la differenza tra il valore che dovrebbe corrispondere ad una sterzatura cinematicamente corretta (γ) e il valore realmente assunto dalla ruota interna (che qui ho messo UGUALE all’angolo della ruota esterna, quindi α), prende il nome di angolo di Ackermann. Ed è l’angolo di “scorrezione” cinematica, ossia indica quanto “scorretta” è (quanto lontano sono dalla condizione di correttezza cinematica) la mia sterzata.
E’ chiaro che, in queste condizioni, cioè in condizioni di sterzatura scorretta, durante il movimento dell’auto, ci saranno degli strisciamenti: la ruota interna “striscerà” anziché rotolare. E questo influisce sull’usura dei pneumatici e sulle forze da imprimere allo sterzo per compiere la curva (anche se, in questo caso, l’introduzione del servosterzo ha annullato il problema…).
Tutte le auto, chi più chi meno, presentano delle “scorrezioni” di sterzo.
Naturalmente, ci sono dei cinematismi, cioè delle soluzioni tecniche, che consentono di contenere queste scorrezioni entro valori accettabili (o voluti), in modo che queste assumano i valori che si vogliono ottenere. vedremo tra poco quali sono questi cinematismi.
Prima però pongo un quesito: secondo voi, perché una macchina dovrebbe avere delle scorrezioni di sterzo (relativamente) ampie? cioè, detto in altre parole, perché un tecnico dovrebbe tollerare (anzi, magari proprio andare a cercare) delle scorrezioni di sterzo (relativamente) elevate? Perché avere tanto “Ackermann"?
(Tenete conto che la ricerca di queste scorrezioni è importante nel caso di vetture a trazione anteriore....le TP non ne hanno bisogno...e quindi non le cercano)…
Perchè su un veicolo a trazione anteriore le ruote anteriori esprimono sia forza longitudinale che forza laterale; introducendo una deviazione dalla condizione di sterzatura cinematica (quindi Ackermann diverso da zero) posso cercare di ridurre l'angolo di deriva della ruota anteriore interna e quindi di limitare la forza laterale espressa dal pneumatico, allontanando la condizione di saturazione.
Pertanto, una certa correzione può essere voluta su una vettura TA se cerco di darle più motricità, mentre su una vettura TP non ho molti vantaggi ad assumere un angolo di Ackermann elevato.
Andiamo avanti. Mi sembra chiaro che per ottenere una corretta sterzatura cinematica, occorre un sistema di collegamento tra le due ruote in grado non solo di farle ruota con angoli differenti durante la sterzata, ma anche di farle ruotare secondo una ben precisa legge di sterzata, che è quella che abbiamo visto prima, cioè con una divergenza tanto maggiore quanto minore è il raggio della sterzata, cioè quanto più giro il volante per sterzare.
E il sig. Ackermann riuscì ad ottenere questa condizione attraverso la realizzazione di un meccanismo alquanto complesso, ma precisissimo (da buon tedesco….), che richiedeva l’uso di coppie prismatiche e una difficile realizzazione. Purtroppo, oltre che complicato era anche, ovviamente, molto costoso. Per cui, praticamente, non applicabile. Oltretutto, come abbiamo detto, in realtà le condizioni di perfetta sterzatura cinematica sono importanti, ma fino ad un certo punto.
Quindi, ci si è accontentati di una soluzione ben più semplice e pratica che venne proposta da un tale di nome Jeantaud; il quale, da buon francese, era un bell’approssimativo…..
Il disegno qui sotto riproduce lo schema del quadrilatero di Jeantaud. Come vedete, ci sono due bracci di accoppiamento, inclinati rispetto all’asse vettura di un certo angolo e rigidamente accoppiati ai fuselli delle ruote, e una barra di accoppiamento che, nel caso delle nostre vetture, è spesso sostituita dalla scatola dello sterzo (la cremagliera). Nei fuoristrada, invece, questa è proprio una barra e lo sterzo agisce, attraverso un braccio su uno solo dei fuselli (di una ruota) e, da questo, attraverso la barra, avviene la rotazione anche della seconda ruota (proprio come nel disegno qui sotto). Ma il discorso è esattamente analogo. Noi, per semplicità, ci riferiamo al caso che ci interessa, che è quello della soluzione adottata sulle nostre macchine, quindi con la scatola guida al posto della barra.
Nota: Tenete sempre presente che questi sono discorsi assolutamente generali, perché poi in realtà ci dobbiamo sommare l'elastocinematica della sospensione, gli scuotimenti, le variazioni di coppia e i punti di applicazione delle forze....per cui il discorso si complica parecchio.
Comunque, diciamo che un certo Ackermann è tollerato, se non proprio voluto, perché mi aiuta anche nel riallineamento: se avessi una sterzata cinematicamente corretta agli alti angoli, poi mi troverei nei casini nel ritorno volante (sempre perché si sommano i contributi della coppia motrice, dei bracci a terra e dei bracci a centro ruota), per cui il fatto che la ruota interna "giri" meno di quello che dovrebbe mi aiuta certamente.
Infatti, guardate le Mercedes (o le BMW): dalla massima sterzata il volante ritorna con difficoltà... Anche se poi, anche per questo problema, ci sono delle furbizie, tipo il "ritorno attivo" che è implementato sui servosterzi elettrici.
Torniamo al nostro quadrilatero e alla nostra figura. Vedete che i prolungamenti dei bracci s’incontrano in un punto, sull’asse di mezzeria del veicolo.
Bene, si può dimostrare che la condizione ideale è quella in cui il punto d’incontro dei due prolungamenti dei bracci debba cadere sull’assale posteriore (o, meglio, se per caso abbiamo un ponte a bracci tirati, sulla retta che congiunge i 2 centri ruota delle ruote posteriori). Questa sarebbe la condizione ideale, per ottenere le minime scorrezioni, che comunque rimangono. Rimangono perché, come detto, il quadrilatero è comunque un'approssimazione; e perché, in ogni caso, gli accoppiamenti tra i vari bracci NON sono perfetti, ma c’è sempre un gioco.
Quindi, si genera un errore, un angolo.
Se ciò non avvenisse, avrei che durante la sterzata, le mie ruote (dx e sx) tenderebbero a divergere secondo una legge ben definita (che non sto qui a scrivervi perché non serve a nulla) e il mio errore sarebbe nullo. Invece, l’errore c’è ed è variabile in funzione della sterzata (cioè varia al crescere dell’angolo di sterzo). Questo errore, in pratica, altro non è se non l’angolo di Ackermann.
Ad essere precisi, va anche detto che si può cambiare la posizione del braccio di interconnessione tra i due fuselli, collocandolo in posizione avanzata rispetto al centro ruota. Pensate, per esempio, alle varie BMW o Porsche, o altre vetture sportive che hanno la scatola guida davanti alle ruote: il discorso è perfettamente analogo, basta solo che sia verificata la condizione (fondamentale) che i prolungamenti dei bracci di accoppiamento s’incontrino in un punto sulla mezzeria del veicolo.
In quest’ultimo caso, poi, il mio quadrilatero prende il nome di quadrilatero di Panhard, anziché di quadrilatero di Jantaud come nel caso della scatola guida posta dietro le ruote (come nelle nostre macchine, 147, 156, Bravo, Punto; ma anche Alfetta e derivate).
Se metto il braccio (qui posto dietro al centro ruota) davanti alle ruote, basta solo che mantenga la convergenza verso l'asse posteriore.
Ora, se riportiamo in un grafico il valore di questo errore in funzione di uno dei due angoli (di una delle due ruote), diciamo per esempio dell’angolo di sterzo assunto dalla ruota interna (per esempio, eh), al variare di dove metto il punto di incontro dei prolungamenti dei bracci (cioè se lo metto perfettamente sull’asse posteriore; oppure davanti all’asse; oppure dietro) abbiamo un grafico come quello messo qui sotto.
Ho usato la notazione del primo disegno, quindi GAMMA è l'angolo della ruota interna e BETA è l'errore...
Il grafico riporta l’andamento dell’errore di sterzo (il mio BETA) in funzione dell’angolo di sterzo della ruota interna (GAMMA) per tre differenti punti di intersezione dei prolungamenti dei bracci del parallelogramma di Jantaud. Sull’ordinata ho il valore dell’angolo di sterzo (GAMMA) della ruota interna.
ATTENZIONE: ho scritto RUOTA INTERNA. ricordatevelo, perché è su quella che dobbiamo fare i nostri ragionamenti
Prendiamo una qualunque delle curve, quella che volete. La a, la b o la c, non importa. Importa guardare l’andamento qualitativo.
Per GAMMA = 0 l’errore è nullo. Giusto. Perché quando la ruota interna è diritta (angolo di sterzo nullo), anche la ruota esterna è diritta. E la macchina va diritta. E l’errore di sterzatura non c’è. Poi, al crescere di GAMMA, la curva dapprima cresce, fino a raggiungere un massimo e da qui comincia a decrescere. Il valore di BETA è comunque sempre positivo. Significa che, al crescere della sterzata, il mio errore cresce (in segno positivo); ossia, se andiamo a vedere il primo grafico che ho postato, il mio BETA, cioè l’errore di sterzo, è come quello disegnato nel grafico. Ad un certo punto, succede che per un determinato valore di GAMMA, il mio errore torna a valere zero, ad annullarsi. Significa che, in quella particolare posizione contraddistinta dal valore (sul grafico) di GAMMA in cui la curva interseca l’asse delle ascisse, sono in condizioni di errore nullo, quindi di sterzatura perfettamente cinematica. Andando oltre, il segno dell’errore s’inverte, diventando negativo e comunque continua a crescere (negativamente). Cosa significa? Vi ricordate che ieri abbiamo detto che, durante la sterzata, deve realizzarsi una divergenza tra le ruote se voglio avere una sterzata perfettamente cinematica? Bene: se l’errore è positivo, come nel primo tratto della curva, significa che rispetto alla mia “divergenza ottimale” che mi garantirebbe la correttezza cinematica, sono “un po’ meno divergente” (cioè tendo a – come dire - “convergere” rispetto alla divergenza “ottima”), e la mia curva sta sopra l’asse delle ascisse (anche se con l’andamento che abbiamo visto: prima l’errore cresce, poi arriva ad un massimo; poi decresce fino allo zero); se l’errore è negativo, invece, significa che sono sotto l’asse delle ascisse e la mia condizione è quella di essere “un po’ (più o meno in funzione dell’errore corrispondente a quel valore particolare di GAMMA) più divergente” rispetto alla condizione di “divergenza ottimale”.
Sappiate, prima di tutto, che la condizione in cui il punto di intersezione dei prolungamenti dei bracci del parallelogramma di Jantaud cade PERFETTAMENTE sull’asse posteriore (garanzia di perfetta, per così dire, sterzatura cinematica; anche se come potete vedere non è affatto così, perché altrimenti al posto della curva rappresentata sul grafico avrei una retta coincidente con l’asse delle ascisse, indice di errore perfettamente uguale a 0) è quella rappresentata dalla curva b.
Adesso, per favore, non state a guardare se le curve a e c sono equidistanti dalla b oppure no; oppure se la a è più vicina alla b di quanto non lo sia la c: prima di tutto, quel grafico l’ho fatto io e me lo sono inventato (quindi, NON ho preso dei risultati sperimentali veri); e poi, è sempre possibile prendere dei punti di intersezione più o meno lontani dall’asse posteriore, con risultati quindi, differenti (e, di conseguenza, con curve differenti).
La curva a è una conseguenza dell’aver posizionato il punto di intersezione dei prolungamenti dei bracci del parallelogramma di Jantaud ALL’INTERNO degli assi del veicolo (tra l’asse anteriore e l’asse posteriore). La curva c, invece, è la curva rappresentativa della collocazione del punto suddetto OLTRE l’asse posteriore.
Prendiamo, ad esempio, la curva a. Come vedete, per piccoli angoli di sterzo, l’errore di sterzata è MINORE rispetto alla b, che prendiamo come riferimento.
Ma l’errore si annulla prima che nella b e poi cresce (negativamente) in maniera più rapida che nella b
L’esatto contrario nel caso della curva c: all’inizio l’errore di sterzatura è più alto che nella b (curva teorica di riferimento) ma poi, per maggiori angoli di sterzo, rimane più contenuto (sempre rispetto alla b).
Quindi:
- se voglio minimizzare gli errori di sterzatura per piccoli angoli di sterzo (cioè per grandi raggi di curvatura che sono poi quelli percorsi ad alta velocità), allora devo riferirmi alla curva a, quindi posizionare il punto di intersezione dei prolungamenti dei bracci del parallelogramma di jantaud all’interno degli assi del veicolo. Quindi, devo inclinare di più i bracci dei fuselli;
- al contrario, se voglio minimizzare gli errori di sterzatura per grandi angoli di sterzo (cioè per piccoli raggi di curvatura che sono poi quelli percorsi in manovra o a bassa velocità), allora devo riferirmi alla curva c, quindi posizionare il punto di intersezione dei prolungamenti dei bracci del parallelogramma di Jantaud oltre il retrotreno. Quindi, devo inclinare di meno i bracci dei fuselli.
Diciamo che, in generale, nella maggior parte delle macchine di serie che non abbiano particolari pretese, si usa collocare il punto di intersezione dei bracci dei fuselli un pochino all’interno (partendo dall’asse posteriore) dei due assi (che significa dare ai bracci un’inclinazione un po’ maggiore di quella ideale = che mi fa coincidere il punto d’intersezione con l’asse posteriore), questo per avere i minori errori di sterzatura ai medi a ai grandi angoli di sterzo. Pur sapendo:
- che la perfetta sterzatura cinematica è comunque impossibile con questo parallelogramma;
- che devo tenere in conto il fatto che la sospensione e lo sterzo hanno un comportamento “elastocinematico”;
- che, infine, la sterzatura cinematica, quando la macchina si muove, NON esiste (un bell’esempio di sterzatura cinematica è la ruota di un treno: per caso, avete mai visto una macchina con le ruote di “ferro”?).
Torniamo ancora al grafico, considerando la curva a.
Abbiamo detto che l’errore, per i piccoli angoli di sterzo, è minore che nel caso della curva b.
Ma guardiamo meglio: un errore minore cosa significa? Abbiamo detto che errore (positivo) significa che sono “un po’ meno divergente” rispetto alla mia divergenza ottimale; e che errore negativo significa che sono “un po’ più divergente” rispetto alla condizione ottimale.
Ma… ATTENTI BENE!!!
Abbiamo anche detto che quel grafico riporta l’andamento dell’errore in funzione dell’angolo di sterzo (GAMMA) della……RUOTA INTERNA.
Quindi, dobbiamo fare riferimento alla RUOTA INTERNA.
Per bassi valori di angolo sterzo (cioè quando vado veloce, su curve ad ampio raggio), a pari GAMMA la mia curva a offre un minore errore cinematico rispetto, per esempio, a c. Cosa significa questo?
Che, tenendo fermo GAMMA della ruota interna (perché è a quella che faccio riferimento per il mio grafico), nel caso descritto dalla curva a la mia ruota esterna sarà MENO STERZATA che nel caso della curva c (e anche di quello della curva b).
Ora, qual è la ruota che “prevale” in curva?
ESATTO! La ruota esterna!
E quindi, se sposto l’inclinazione dei bracci collegati ai fuselli, oltre ad ottenere un punto di intersezione interno ai due assi che mi permette di ridurre gli errori di sterzatura cinematica, COSA ottengo ANCHE?
ESATTO!!! Una minore sterzatura della ruota esterna (a pari angolo di sterzo interno, eh)! E quindi?
ESATTO!!!!! Più sottosterzo, perché se mantengo costante l’angolo della ruota interna (che sarebbe il mio riferimento per la comprensione di questo grafico), una diminuzione dell’errore di sterzo equivale ad una “apertura” (“divergenza”) della ruota esterna, che è poi quella che “guida” la macchina.
Riassumendo:
partendo dalla condizione ideale (per modo di dire, eh!) che consiste nel posizionare il punto di intersezione dei prolungamenti dei bracci del parallelogramma di Jantaud sull’asse posteriore:
1) se sposto questo punto verso l’interno (tra i due assali), riduco (rispetto alla condizione ideale, tenetelo sempre presente!!) gli errori di sterzatura cinematica ad alta velocità (a bassi angoli di sterzo; sui grandi raggi di curvatura), li aumento a bassa velocità (ad alti angoli di sterzo; su stretti raggi di curvatura). Ma aumento il sottosterzo;
2) se invece sposto questo punto oltre l’asse posteriore, aumento (anche qui: rispetto alla condizione ideale!!) gli errori di sterzatura cinematica ad alta velocità (a bassi angoli di sterzo; sui grandi raggi di curvatura), li riduco a bassa velocità (ad alti angoli di sterzo; su stretti raggi di curvatura). Ma diminuisco il sottosterzo.
Però, considerato che la condizione di sterzatura cinematica (o comunque di una sterzatura molto corretta) per tutti i raggi di curvatura (e/o anche in generale) è meno importante di quanto non si possa pensare, perché comunque la sterzatura “dinamica”, l’elastocinematica delle sospensioni e i giochi (inevitabili) della catena cinematica di sterzo (e dei semiassi, etc, ect) comportano degli errori di gran lunga ben maggiori del massimo errore di sterzatura del quadrilatero dello sterzo, possiamo affermare che della sterzatura cinematica, tutto sommato, possiamo (quasi) “fregarcene”.
Quindi: W l’ACKERMANN!
Aggiungo solo che:
1) in tutto quanto detto fin qui non si è tenuto conto del fatto che la sospensione lavora, quindi a questi fenomeni vanno sommati gli effetti dell'elastocinematica della sospensione durante gli scuotimenti (recuperi di camber, convergenza, etc);
2) le macchine da corsa (F1 e GT e macchine da corsa VERE) hanno i bracci dei fuselli PERFETTAMENTE paralleli all'asse vettura (cioè NON inclinati), quindi con grandi correzioni.
Se notate, l'Ackermann è UNO dei (tantissimi) modi di modificare il comportamento dell'auto (modificare il comportamento sotto/sovrasterzante, per esempio). Però, NON è l'unico: deve essere chiaro.
Diciamo che, in realtà, l'Ackermann serve soprattutto per "linearizzare" il più possibile la sterzatura dell'auto: una vettura più lineare nel comportamento è sicuramente più bella da guidare.
Cosa significhi "linearizzare", lo vedremo più avanti.
MODELLO A BICICLETTA.
Introduciamo il modello a bicicletta.
Che cosa vuol dire? Vuol dire che considero la macchina in maniera molto semplice, conglobando l’asse anteriore e l’asse posteriore (o, meglio, gli effetti generati dall’uno e dall’altro) in due ruote: anteriore e posteriore.
Questo vuol dire, per esempio, che la ruota anteriore genererà le forze che vengono generate da TUTTO l’asse anteriore. E così dietro.
Ma vuole anche dire che, ai fini del nostro calcolo, non terremo conto dei trasferimenti di carico, per esempio. Né laterali (rollio), né longitudinali (beccheggio, ect). Naturalmente, questo significa anche che non considereremo il rollio e il beccheggio; intesi come movimenti, come angoli.
Insomma, è come avere una bicicletta (appunto!) che, per sterzare, non s’inclina ma lo fa semplicemente ruotando la ruota anteriore. Attenti bene: la ruota anteriore, come d’altronde quella posteriore, generano FORZE! Quindi, sono distanti dalle condizioni cinematiche che abbiamo visto nelle discussioni passate (per esempio nel caso dell’Ackermann): e, per generare forze, le ruote devono avere SCORRIMENTI. Cioè scorrimento longitudinale e scorrimento trasversale (deriva).
Ma a noi, per quello che ci interessa vedere, cioè l’handling (che poi altro non è se non la dinamica dell’auto in senso trasversale), dello scorrimento longitudinale (quello che abbiamo chiamato SIGMA, indicandolo con σ e che consente di frenare e accelerare) NON CE NE FREGA NULLA.
Rimane, allora, la DERIVA. Quindi, ripassatevi bene la deriva e NON confondetela con l’angolo di sterzo, che è un’altra cosa.
Diciamo anche che, nel modello “a bicicletta” che abbiamo qui schematizzato, non introduciamo forze aerodinamiche (e ci mancherebbe: che ci frega?).
Diciamo due parole, invece, dei pneumatici. Bene: nel caso del modello “a bicicletta”, considereremo i pneumatici SOLO nella loro zona LINEARE. Ovvero (se riguardate il grafico col Carpet di deriva pubblicato nelle Faq precedenti) che ipotizziamo che le ruote assumano angoli di deriva piccoli, in modo da essere nella zona di sinistra del grafico, in cui Fy è direttamente proporzionale ad alfa e siamo lontani dal picco di forza laterale.
Ecco il modello bicicletta:
Supponiamo di essere in condizioni stabilizzate, ovvero di percorrere la curva a velocità costante, e analizziamo le sigle, partendo dalla ruota anteriore..
Con la lettera greca DELTA ho indicato l’angolo di sterzo. Questo è proprio l’angolo di cui ruota la mia ruota davanti quando giro il volante.
Mentre ALFA (α) è l’angolo di deriva, qui specificato sia per l’anteriore che per il posteriore, dato che siamo in condizioni reali e anche il posteriore ha un suo angolo di deriva.
Guardate la freccia rossa della ruota davanti (ma anche di quella dietro). L’angolo formato dalla velocità (freccia rossa) con l’asse della ruota E’ l’angolo di deriva. E considerate pure, guardando la ruota anteriore, che angolo di deriva e angolo sterzo NON sono la stessa cosa!
L’angolo di sterzo, in queste condizioni, è SEMPRE maggiore dell’angolo di deriva.
Poi c’è un’altra freccia rossa, posta nel baricentro (CG), che genera un angolo con l’asse vettura (della bicicletta). Allora, l’angolo, che indico con BETA (β) è l’angolo di assetto della bici (della vettura). Attenti bene a non confonderlo con l’assetto come lo conoscete voi….”quello” (di assetto) è l’assetto della vettura, ossia la posizione statica della vettura rispetto alla linea di terra (quello che comunemente viene indicata come “l’altezza” della macchina…. Infatti, una macchina “assettata” è, nel gergo comune, una macchina “abbassata”).
Qui, l’assetto è un’altra cosa: l’angolo di assetto è l’angolo formato dalla velocità (del baricentro!!!!), indicato dalla freccia rossa, con l’asse della vettura (che nel mio caso è la bicicletta). Guardate la figura: l’angolo di assetto BETA che ho disegnato è POSITIVO, perché è rivolto all’interno della curva.
Immaginate una macchina che sta facendo una curva “di traverso”, in derapata. In quel caso, pensate a come può essere l’angolo di assetto di quella vettura. L’angolo di assetto sarà rivolto verso l’esterno della curva perché il vettore velocità (rosso) è diretto verso l’esterno, fuori (e infatti la mia macchina è di traverso…) mentre l’asse di mezzeria della macchina “guarda” verso l’interno.
Abbiamo anche il passo, indicato con l minuscolo e i due semipassi anteriore e posteriore (a e b) che sono, in pratica la distanza del baricentro rispettivamente dall’asse anteriore e dall’asse posteriore. Chiaro che, se ho il baricentro (CG) spostato in avanti a sarà minore di b; e viceversa.
Infine, c’è il centro di istantanea rotazione O. Invero ho anche disegnato O’ perché ci servirà. E c’è, naturalmente, il raggio della curva R.
Con un po’ di trigonometria, mettiamo in relazione l’angolo di assetto β con gli angoli di deriva (αa e αp) e l’angolo di sterzo .
In pratica questo significa che devo prendere una parte del semipasso posteriore b.
Nota: Commettiamo un errore minimo a considerare R come il segmento O-CG e anche il segmento O-centro ruota posteriore (ma è appunto trascurabile ai fini della nostra spiegazione).
Quindi:
R sin (αp) = b – R sin (β)
R sin (αp) è quel “pezzo” di segmento che va dal centro ruota posteriore a CG, quindi un pezzo del semipasso posteriore b.
E poi (questa è più facile se guardate la figura):
R cos (αp) = R cos (β)
Quindi, diventa
Però,noi abbiamo detto che sia β, sia αp (cioè l’angolo di deriva posteriore) sono PICCOLI, cioè hanno valori PICCOLI.
Questo significa che:
- il seno di β, cioè sin(β), sarà asintotico a β;
- il coseno di β, cioè cos (β), sarà asintotico a 1;
- la tangente di α, essendo null’altro che il rapporto tra seno e coseno, sarà asintotico al rapporto tra α e 1. Quindi, varrà α.
Allora la formula qui sopra diventerà:
b/R – Rβ/R ~ αp
Quindi, semplificando R nel secondo termine:
b/R – β ~ αp
Che, scritto meglio diventa:
Adesso, possiamo fare lo stesso discorso per l’anteriore, trovando la relazione che ci permette di “collegare” l’angolo di sterzo () con gli angoli di deriva anteriore e posteriore.
Evitiamo i conti (se volete divertirvi, fatelo voi per esercizio) e passiamo subito al risultato.
Queste due formule, che adesso andiamo a vedere, devono essere stampate nella vostra testa!
La prima formula dice che l'assetto, cioè quanto il muso della macchina punta all'interno o all'esterno della curva, dipende SOLO da una costante, che è b/R, e dall'angolo di deriva del posteriore. Ossia, il fatto che la macchina "assetti", cioè si disponga poco o tanto "di traverso" (in condizioni stabilizzate!!!!) dipende solo DAL POSTERIORE. Quindi, potete fare tutto quello che volete al vostro avantreno (per esempio, cambiare le gomme, cambiare la convergenza, il camber o quel che volete voi) ma il comportamento della vostra macchina NON cambierà per niente. Dovete intervenire sul posteriore.
Ossia, se durante la curva la vostra macchina si dispone tanto o poco di traverso, cioè rivolge il muso (durante tutto l'arco della curva) dentro o fuori la traiettoria, verso il centro della traiettoria o verso l'esterno, questo dipende SOLO dal posteriore.
La seconda formula mi dice che la quantità di sterzo necessaria per compiere la curva, cioè "quanto" devo girare il volante, dipende (a meno, anche qui da un coefficiente) dal rapporto tra avantreno e retrotreno.
Un paio di riflessioni:
- In condizioni cinematiche, l'angolo di sterzo dipende solo da parametri geometrici (e mi sembra ragionevole...);
- per opportuni valori di deriva anteriore e posteriore potrei avere che, in condizioni stabilizzate, percorro una curva di raggio R con angolo di sterzo nullo (a ruote dritte...);
- al limite, se deriva posteriore >> deriva anteriore, per percorrere la stessa curva di raggio R mi serve un angolo di sterzo negativo (sterzo verso l'esterno) e anche l'angolo di assetto sarà negativo (macchina che punta verso l'esterno). Ma in questo caso siamo fuori dall'ipotesi iniziale di angoli di deriva piccoli...quindi le approssimazioni che abbiamo fatto potrebbero non essere più valide.
A questo punto, facciamo una breve considerazione sui sistemi di riferimento e introduciamo una nuova grandezza.
Per convenzione, si utilizzano TRE sistemi di riferimento distinti:
- Il primo è, come sempre, quello INERZIALE: tre assi, XYZ, fissi;
- Il secondo è il sistema di “assi corpo”, ossia un sistema xyz (una terna cartesiana) “relativo”, detto anche “assi veicolo” fissato alla scocca della macchina che si muove con esso;
- Il terzo, un sistema di riferimento, x’ y’ z’ detto “assi corpo ausiliario”, che si muove con la macchina.
A questo punto, possiamo RI-definire tutti i nostri parametri, e aggiungerne uno nuovo:
1) Ay, l’accelerazione laterale: è la componente del vettore accelerazione del veicolo applicata in CG e parallela alla direzione y’ del sistema ausiliario;
2) β, angolo di assetto: l’angolo (l’angolo, non il vettore) tra il vettore velocità di CG e l’asse x’ (o x perché coincidono in questo caso);
3) La grandezza nuova, che è chiamata angolo di IMBARDATA, è l’angolo formato dall’asse X della terna inerziale e l’angolo x’ della terna di “appoggio” (“ausiliaria”). Si indica con PSI ()
Naturalmente, la variazione di quest’angolo nel tempo, prende il nome di VELOCITA’ d’imbardata (d/dt) e si indica con ’.
Vediamo di chiarire “intuitivamente” cosa siano assetto e imbardata (sempre nella speranza che nessun esperto di dinamica del veicolo passi di qui e legga quanto sto per scrivere) in modo che possiate capire. Per chiarirvi un po’ le idee, direi di rifarci “alle stelle e ai pianeti”: pensate alla terra, che ruota attorno al sole. Supponente che il moto attorno al sole sia circolare (anche se non lo è…). Oltre a girare intorno al sole (per fare 1 giro completo ci mette un po’ più di 1 anno), la terra ruota intorno al suo asse (per fare 1 giro completo ci mette 1 giorno). Allora, la velocità d’imbardata è un po’ come la velocità di rotazione (1 giorno); la velocità di assetto è un po’ come la velocità di rivoluzione (1 anno).
Vi ricordate quando vi dicevo che:
“Vedete anche che il CG non è perfettamente al centro della macchina (ossia, è spostato in avanti). Ciò significa che la distribuzione dei pesi è spostata verso l’asse anteriore.
Allora, diciamo che la forza laterale TOTALE generata dai pneumatici anteriori e posteriori, cioè la SOMMA delle due forze Ff e Fr, deve EGUAGLIARE le forza F centrifuga che agisce sul CG. Mi sembra chiaro, no? Quindi, la posizione spostata n aveanti o all’indietro del CG determina la distribuzione delle forze tra anteriore e posteriore e, di conseguenza, sempre in proporzione, la quantità di “cornering force”, cioè di forza trasversale, che i rispettivi pneumatici (anteriori e posteriori) devono generare se vogliamo che la macchina stia in strada (o, meglio, sulla traiettoria impostata). Anche questo fatto, mi sembra chiaro, no?..........” (con disegno allegato) (VOL. 5 - Cornering force)?
Non l’ho messo lì mica per niente. L’ho messo perché sapevo che poi lo avremmo usato.
Ecco, è venuto il momento di usarlo. Riprendiamo dunque il nostro disegno e aggiungiamogli le forze: CENTRIFUGA (Fc), DI ADERENZA ANTERIORE (Fyf) e POSTERIORE (Fyr).
Come sempre, visto che gli angoli sono piccoli, avremo che il seno dell’angolo è asintotico all’angolo stesso; il coseno dell’angolo è asintotico a 1.
Facciamo l’equilibrio in direzione laterale Fy.
Dovrà essere che le forze esercitate dai pneumatici anteriore e posteriore dovranno equilibrare la forza centrifuga Fc.
La forza centrifuga Fc vale:
che posso anche scrivere come:
Fc = m * (’)2 * R
Quindi:
Fc = Fyf + Fyr
Poi facciamo l’equilibrio attorno al centro di gravità. Cosa vuol dire? Significa che NON HO VELOCITA’ DI IMBARDATA.
Se non avessi questo equilibrio, significherebbe che la macchina RUOTA ATTORNO AL SUO ASSE VERTICALE (che so, parte in testacoda, per esempio, se la forza Fyr moltiplicata per il braccio b è minore di quella anteriore Fyf moltiplicata per a).
Quindi il momento intorno a z
Mz = (Fyf) * a – (Fyr) * b = 0 (guardate sempre il disegno con le forze colorate di verde)
Se metto insieme tutte queste equazioni, cioè se le risolvo, ottengo:
Dove Mf e Mr sono le ripartizioni di peso all'anteriore e al posteriore. Ossia, quanto del peso totale della macchina (della bici) compete all'asse anteriore e quanto al posteriore.
Ricordiamo che Fy, la forza trasversale generata dai pneumatici è il prodotto di un coefficiente, la rigidezza di deriva (C), per l'angolo di deriva del pneumatico α:
Fy = C α
Quindi la mia α (deriva) diventa per il posteriore:
e per l’anteriore:
Ora, se aggiungo queste relazioni alle formule precedenti, avrò:
Abbiamo legato l'angolo di cui ruota la ruota anteriore con l'angolo di deriva (anteriore e posteriore) e con l'accelerazione trasversale Ay; e l'angolo di assetto con l'angolo di deriva posteriore e con l'accelerazione trasversale Ay (Ay è una sola, eh).
Ma a noi, dell'angolo di cui ruota la ruota anteriore interessa relativamente. ci interessa di più "di quanto devo girare il volante", ossia l'angolo di sterzo.
Quindi, dovrò moltiplicate tutto per il mio rapporto di sterzo TAU ().
Se lo faccio, la formula dell'angolo di sterzo diventa quella scritta qui sotto. mentre per l'angolo di assetto non cambia nulla:
Se pongo:
Otterrò allora la madre di tutte le formule della dinamica del veicolo!
Queste formule son da imparare a memoria!
Adesso vediamo che cosa vogliono dire:
- il termine KBETA prende il nome di GRADIENTE DI ASSETTO;
- il termine KUS prende il nome di GRADIENTE DI SOTTOSTERZO.
Entrambi si misurano in RAD/(m/sec2).
- 0 e β0 sono i e β cinematici.
Per il momento, noi andremo a vedere il comportamento della bicicletta (dell'auto) nella zona di funzionamento LINEARE del pneumatico.
Come vedete, l'angolo di assetto β è la somma di due contributi: una costante b/R (semipasso posteriore diviso R) e una funzione lineare di Ay.
b/R prende il nome di assetto cinematico. ossia di angolo di assetto che la mia bici (ma possiamo parlare di macchina, se volete) assume quando l'accelerazione Ay è nulla, ossia quando vado talmente piano che non ho forza centrifuga (in pratica, quando sono fermo). Se osservate il disegno (del modello a bicicletta con le forze in verde) postato in precedenza, è "l'angolo di deriva di CG" quando vado pianissimo (al limite, quando sono fermo): per farla breve, tiro il segmento che congiunge O' con CG e poi traccio la perpendicolare a quel segmento. L'angolo tra l'asse della bici e la perpendicolare è il mio β0.
Vuol dire che, in condizioni cinematiche, più b è grande (quindi, o l'auto è lunga o il mio CG è spostato in avanti) più il mio assetto sarà elevato (ossia, più il muso dell'auto punterà, sempre in condizioni stabilizzate, verso l'esterno); più R è grande, MENO tutto ciò avverrà. Se volete, se vi è più facile, potete leggerlo come una condizione di sottosterzo: non è corretto ma vi serve per capire.
Al generarsi di una velocità diversa da 0 o, quantomeno, non piccolissima, nasce un'accelerazione Ay. Quindi, il mio dipenderà dal Ay moltiplicato per KBETA.
KBETA, a sua volta, dipende SOLO E UNICAMENTE dal posteriore: massa e rigidezza di deriva del posteriore, e basta.
Cosa vuol dire? Vuol dire che l'assetto, ossia come si dispone la macchina in curva, dipende solo e unicamente dal retrotreno.
Osserviamo queste tre condizioni, per farvi capire.
In NERO, la condizione CINEMATICA. Come vedete, non ci sono derive e la direzione della velocità della ruota posteriore è perpendicolare al segmento che unisce il centro di istantanea rotazione O con la ruota dietro. in condizioni cinematiche, Ay vale 0. l'angolo di assetto β (deriva del CG) ha un certo valore, il valore β0, pari a b/R. Il muso dell'auto è in fuori (assetto positivo).
Poi, quando comincio a muovermi, la mia Ay compare e il mio centro O comincia a spostarsi verso CG. Man mano che Ay cresce, O si sposta fino a mettersi "alla stessa altezza" di CG.
In ROSSO, la condizione in cui CG e O sono alla stessa altezza. In questo caso, l’angolo di assetto β (deriva di CG) vale 0.
Vorrei sapere, da voi, a quale velocità V corrisponde questa condizione. la mia macchina (bicicletta) comunque, è perpendicolare alla traiettoria.
In VERDE, il centro di istantanea rotazione O sta "più in alto" di CG. In questo caso, assumerà valori NEGATIVI. ATTENTI BENE: sono sempre in condizioni stazionarie e di equilibrio, ossia, non sto andando in testacoda! Ma ad ogni modo sto facendo la curva con il muso dell'auto che guarda verso l'interno della curva.
Tutto ciò, fino a quando arrivo a NON avere deriva sull'asse anteriore (ossia, O si pone all'altezza del centro ruota anteriore). naturalmente, in questo caso, la mia macchina (bici) starà TUTTA oltre il cerchio di raggio R. Oltre questo limite, inizio il controsterzo.
Perciò, il comportamento (stazionario) dell'auto durante la curva dipende da β, cioè dall'asse posteriore.
β è infatti funzione di una costante e di un coefficiente (KBETA) moltiplicato per Ay.
Ho detto che la prova che faccio è lo steering pad.
Al crescere di Ay, come varia BETA?
Valutiamolo con il grafico sottostante (i numeri sono inventati, è importante il concetto):
Come vedete, zero vale un po' più di 8 e corrisponde ad Ay=0. quindi è il rapporto b/R ed è l'intersezione con l'asse delle ordinate.
β si annulla per un valore di Ay pari a circa 1,8 g (Ay l'ho messo in g). In pratica è l'intersezione con l'asse delle ascisse
R non c'è. mi sembra ovvio: c'è Ay che dipende da R attraverso V (meglio: V2)
Come cambierebbe la retta se cambiassi R? Semplice: R compare "solo" in βzero, quindi cambiando R la retta trasla su o giù, ma non cambia pendenza; cambia di conseguenza anche il punto in cui interseca l'asse delle ascisse
Torniamo un attimo alla fig. 18.
Mi sembra chiaro che tutto quello che abbiamo detto riguardo lo spostamento di O (centro di istantanea rotazione) verso CG e oltre (cioè oltrepassarlo), dipenda dal fatto che, nel momento in cui mi muovo (comincio a prendere velocità), nascono DERIVE; e che sono le derive le responsabili del cambiamento di posizione di O. Quindi, il centro di istantanea rotazione O si sposta rispetto alla condizione cinematica solo in virtù della presenza delle derive!
Quanto alla posizione di CG, io ho disegnato un CG un po' spostato in avanti (per il momento, dove mettiamo CG non importa. Avrei fatto meglio a mettere CG perfettamente in mezzo tra l'asse anteriore e quello posteriore, per evitare fraintendimenti. ma sappiate che, per il momento, non importa dove sta CG).
Inoltre, la condizione in cui β è uguale a 0, cioè la velocità del baricentro CG coincide con l'asse della bicicletta (della vettura) è quella in cui β si annulla.
Guardate questo grafico adesso:
Supponiamo che le due curve qui disegnate siano rappresentative di 2 vetture che hanno lo stesso passo (cioè l è uguale per entrambe). Però, una delle due ha il CG (baricentro) più spostato in avanti dell’altra, quindi i valori di b e di a (cioè i semipassi anteriore e posteriore) differenti (facciamo finta che una abbia un motore 4 cilindri e l’altra ha un motore 6 cilindri in linea….. qualcosa che mi fa cambiare la posizione di CG insomma).
Naturalmente, supponiamo che stiano percorrendo lo stesso steering pad.
Ora rispondete a queste domande:
1- Quale delle due vetture ha il baricentro più spostato in avanti?
2- Quale delle due ha le gomme più grosse sul retrotreno (ossia, le più performanti; che, in genere, coincide con quelle più larghe)? (Guardate che è una domanda che, volutamente, vi trae in inganno….rispondete facendo un ragionamento….DUE possono essere le risposte (almeno a livello teorico, perché poi, se si guarda bene il grafico….)
3- Infine, quale delle due ha più “appoggio” al posteriore? (Questa è invece una domanda con una sola possibilità di risposta)
Risposte:
1- ho detto che le due macchine sono uguali in tutto tranne che per qualcosa che mi fa cambiare la posizione del baricentro. quindi hanno uguale il peso TOTALE (ma non la ripartizione di peso) e il passo (che abbiamo indicato con l).
ora, β abbiamo detto essere uguale a β0 - KBETA*Ay
β0 vale b/R
e KBETA vale Mr/Cr ossia il rapporto tra il peso che grava sul posteriore e la rigidezza di deriva del posteriore.
Se guardo le due figure vedo che quello che ha il β0 maggiore, ossia il b maggiore, è la curva ROSSA. che è anche quella più pendente, ossia quella che ha il maggiore Mr/Cr.
Però, io il baricentro lo misuro in condizioni statiche... Vi ricordate come varia la rigidezza di deriva in funzione della forza peso (meglio sarebbe dire forza normale al pneumatico)? (*)
2- se dovessimo ragionare per assurdo, ossia supponessimo che Mr fosse uguale per le due auto (per semplicità) allora potremmo dire che quella con la minor pendenza è quella con la maggiore rigidezza di deriva (quindi, con le gomme più "larghe"). Altrimenti, anche in questo caso, dobbiamo considerare la domanda qui sopra: conoscete come varia C in funzione di Fz? (*)
3- quella blu. perchè "sopporta" maggiori accelerazioni trasversali per avere assetti nulli o, peggio, negativi.
Per appoggio s'intende la sensazione di "tenuta" del posteriore, di capacità di assorbire i carichi laterali, di accettare un elevato impegno (trasversale) della vettur. in pratica, è la sensazione di vettura "sicura", stabile: è difficile che perda aderenza al posteriore.
(*) Guardate qui sotto e considerate la curva per α = 2 perchè è più semplice da capire.
insomma, come per il caso di Fy, anche nel caso della rigidezza di deriva, si ha prima una crescita (più o meno lineare) e poi la tendenza a saturare. nel senso che, se continuo a far aumentare il peso sulla mia ruota, la rigidezza di deriva non aumenta SEMPRE e in proporzione, ma prima o poi la smette di aumentare (satura, appunto!). cresce, cresce, cresce e poi cresce un po' meno; poi sempre meno, e così via...come descritto in questo grafico.
L'avevamo detto, no? Beh, ricordatevelo bene, perchè ci servirà tra poco.
Ora, supponiamo di dividere Fz per g (9,807... m/s2): cosa otteniamo?
Otteniamo M, cioè la massa gravante sulla ruota.
Adesso, Mr/Cr cos'è?
E’ la pendenza della ia curva C-Fz del grafico riportato prima MA RISPETTO ALL'ASSE DELLE Y (cioè di Fz)!!!!!!
Quindi, avere un rapporto Mr/Cr maggiore, cosa vuol dire? Osservate sotto:
vuol dire che se il mio rapporto Mr/Cr della macchina 1 è > del rapporto Mr/Cr della macchina 2, allora sono nella zona più alta della curva descritta prima, quindi.....PIU' VICINO AL LIMITE!!!!!!!!
Se Mr/Cr è più basso significa che (ammesso che Mr sia costante) ho una maggiore rigidezza di deriva, ossia ho più da spendere.....
ECCO COME VANNO INTESI Mr/Cr (e, come vedremo in seguito, Mf/Cf), ossia, VANNO VISTI NEL COMPLESSO e non COME COSE SEPARATE (Mr E Cr DISTINTI...).
Quindi, per tornare alle domande poste sopra, la curva blu, meno pendente, è quella che ha il più basso rapporto Mr/Cr, quindi più appoggio, infatti, si annulla più avanti come Ay.
Ed ecco quindi che le risposte definitive alle 3 domande iniziali sono:
1) la posizione del baricentro, in tutti i corpi, è una sola. E la posizione del baricentro si determina forse in condizioni statiche.
E allora il mio β0 (assetto cinematico) non è forse il valore di β in condizioni praticamente STATICHE?
E, siccome β0 = b/R, allora supponendo R uguale in entrambi i casi, avrò che la macchina che ha il valore di b maggiore (quindi di β0 maggiore) è quella che ha il semipasso posteriore maggiore, quindi la posizione di CG più avanzata. Quindi, la retta ROSSA.
2)Qui, potevate seguire 2 strade.
La prima, più semplice e “facile”, supponendo che ripartizione dei pesi al posteriore non fosse troppo dissimile (d’altronde, i valori di β0 delle due auto non sono troppo diversi…quindi, i semipassi posteriori non sono troppo differenti). Siccome il valore di β, gradiente di assetto, E’ la pendenza della curva di assetto, e che β vale Mr/Cr (ossia il rapporto tra la massa sull’asse e la rigidezza di deriva dell’asse); supponendo che Mr sia uguale in entrambi i casi, la macchina che avrà Cr maggiore avrà, di conseguenza, il β minore ossia la pendenza minore (in valore assoluto, eh; perché poi ci sta il segno negativo davanti). Quindi, la retta BLU.
La seconda, meno semplice e intuitiva, passa per il discorso della rigidezza di deriva del pneumatico in funzione del carico perpendicolare al piano d’appoggio del pneumatico stesso. Diciamo subito che, poiché noi supponiamo di essere su una strada piana, il carico perpendicolare al piano d’appoggio del pneumatico coincide, nel nostro caso, col peso che grava sul pneumatico (cioè, quella parte del peso della macchina che gli grava sopra).
Allora, ho postato io il grafico Fz-C. Come vedete, tale curva è molto simile alla curva Fy-α (cioè forza trasversale - angolo di deriva) del pneumatico, che ben conoscete: una prima (breve) parte rettilinea, poi la perdita di linearità, fino alla saturazione e al calo. Praticamente lo stesso andamento. Solo che qui, invece di avere sulle ascisse α e sulle ordinate Fy, abbiamo sulle ascisse Fz (la forza normale) e sulle ordinate C (la rigidezza di deriva).
Ora, come sapete, Fz cioè il peso, vale Mg, cioè la massa moltiplicata per l’accelerazione di gravità.
Cioè Fz = Mg
Adesso, se divido Mg per g, ossia Mg/g, ottengo M.
Quindi:
Fz/g = Mg/g = M
In pratica, se divido per g (accelerazione di gravità = a circa 9,807 m/s2), il mio grafico NON cambia affatto il proprio aspetto. Semplicemente, riscalo l’asse delle ordinate. E tutto vale come prima.
Quindi, quello che prima era il coefficiente angolare in un punto della mia curva, cioè C/Fz, adesso, rimane sempre il coefficiente angolare della mia curva (sempre in quel punto), seppure numericamente diverso, perché c’è un ordine di grandezza (9,807) di differenza…ma diventa C/M; che, nel nostro caso è C/Mr perché stiamo parlando del retrotreno. Attenti: è il coefficiente angolare della curva RISPETTO ALL’ASSE DELLE ASCISSE!!!!!
Ma C/M non è forse l’inverso di M/C? e Mr/C non è forse il mio β (a meno di Ay)? E non è forse ANCHE il coefficiente angolare della mia curva MA STAVOLTA RISPETTO ALL’ASSE DELLE ORDINATE?
Allora, invece di andare a vedere quanto era la mia massa in entrambe le vetture (ragionamento 1), non facevo prima a vedere quanto era la pendenza delle 2 curve?
Andate a vedere il grafico coi due coefficienti angolari (α e β) che ho disegnati RISPETTO ALL’ASSE DELLE ORDINATE (Y): vedrete che il punto di Mr/C (pendenza) più basso (corrispondente a β) è quello dove ho “più margine”, “più tenuta”; mentre quello dove è più alto (corrispondente a α) sono già nella zona di quasi saturazione. Quindi, sarò più vicino al limite.
Ora, quello dove è più basso, dove ho più margine di tenuta, è quello corrispondente, dunque, a quello della curva BLU!!!!
(e, infatti, come vedete, nel caso della curva blu ho bisogno di meno angolo di assetto, e quindi di meno angolo di deriva del posteriore, per “sostenere” la medesima Ay. Insomma, a pari Ay la macchina BLU si mette meno di traverso…..)
3) in conseguenza di quello che abbiamo detto fino ad ora, è la macchina BLU che ha il maggiore appoggio.
Facciamo un altro passo avanti. Guardate la figura qui sotto.
Abbiamo visto che, se faccio una curva di raggio differente, cioè se varia R, la curva di assetto (β = l/R – Mr/Cr * Ay) si sposta in su (se il raggio diminuisce) o in giù verso l’origine degli assi (se R aumenta).
Mi sembra chiaro che il valore di “assetto cinematico” (l/R) NON possa essere 0 (zero) perché significherebbe che NON sto facendo una curva ma sto andando dritto. Al limite, potrà assumere un valore bassissimo (al limite prossimo allo zero; ma non zero), il che significherebbe che sto facendo una curva di raggio amplissimo….ma non zero.
Questa considerazione è la traduzione alla “parla come mangi” di una ben precisa formulazione di analisi matematica, che recita che la funzione l/R tende ad assumere il valore 0 (zero) (ho detto TENDE, mica ASSUME) quando R tende ad assumere un valore sempre più grande (al limite, infinito…che corrisponde alla condizione di marcia rettilinea). E’ la teoria dei limiti di funzione.
Nel grafico, vedete bene le differenti curve (che poi sono rette, per ora) di assetto. Vedete che traslano in su o in giù. Quello che non cambia, invece, è la pendenza delle rette.
La pendenza delle rette dipende infatti dalla….rigidezza di deriva dell’asse (posteriore).
Attenti, ho detto rigidezza di deriva dell’asse e non della (delle) ruota (ruote) perché nelle formula compare non solo Cr (rigidezza di deriva del pneumatico) ma anche la forza normale al pneumatico (= la quota di peso????) posteriore e l’accelerazione trasversale Ay (a sua volta funzione della velocità V e del raggio R).
Ora, se voglio proprio essere corretto, devo dire che la forza normale al pneumatico NON è rappresentata solo dalla forza peso che compete all’asse posteriore, ma pure dal trasferimento di carico (che dipende dall’altezza del baricentro e dalla carreggiata) e dalle rigidezze della sospensione. Insomma, la forza normale al pneumatico altro non è se non la forza scambiata tra pneumatico e strada in direzione NORMALE al terreno. Capito?
Chiaramente, a basse accelerazioni trasversali possiamo tranquillamente considerare solo il peso…
Bene, chiarito questo punto, andiamo avanti.
Abbiamo dunque visto cosa succede se vario R, il raggio della traiettoria. E la cosa vi è apparsa facile perché siete riusciti a immaginarvela, a descriverla nella vostra mente.
Ma…..se vario V, la velocità?
Cosa vuol dire variare V?
Ve lo dico io: è l’equivalente di sterzare (di più o di meno) mentre sto curvando.
Per farvi capire cosa succede, ho tirato delle rette rosse tratteggiate. Rappresentano quello che vi dicevo: mentre viaggio a velocità costante, giro il volante. In pratica, è l’equivalente di accelerare o rallentare tenendo il volante fermo.
Sono segmenti a iso-velocità. E la velocità con cui si muove la macchina cresce nel senso indicato dalla freccia rossa. Ossia, la prima retta (quella inclinata di più) corrisponde ad una velocità di percorrenza della curva INFERIORE rispetto, che so, al segmento successivo o a quello dopo ancora. Insomma, guardate la freccia rossa: i segmenti cambiano inclinazione al crescere della velocità.
Bene: consideriamo uno di questi segmenti tratteggiati. Per esempio, il primo. Significa che:
sto facendo la curva a una certa velocità (corrispondente a quel segmento), piuttosto bassa. Comincio a girare il volante. Per andare su valori di assetto elevati, devo crescere con l’accelerazione trasversale Ay. guardate il grafico: per passare dalla curva di assetto azzurra a quella blu (muovendomi lungo il segmento tratteggiato rosso), devo girare il volante di un certo angolo (e far crescere Ay).
Se, invece, sono ad una velocità differente (comunque maggiore di prima), mi trovo su un altro segmento tratteggiato, corrispondente alla mia differente velocità V. Diciamo il secondo segmento. Per passare dalla curva di assetto azzurra a quella blu, corrispondente al medesimo raggio R di prima, dovrò girare il volante dello stesso angolo. Ma la mia Ay crescerà di parecchio, MOLTO PIU’ di prima. Significa che, a pari angolo volante che giro, se vado più veloce, avrò accelerazioni ben maggiori!!!
Proprio questo è il punto: questo grafico vi mostra come varia la curva di assetto al variare della velocità.
In pratica, se accelero, e non giro il volante (il problema del volante lo vedremo tra poco), ammesso di accelerare lentamente da evitare il trasferimento di carico longitudinale etc etc (tutto quello che abbiamo detto), mi porto su livelli di Ay maggiori, a pari R. Quindi, in pratica, se sono sulla curva di assetto arancione, mi sposto lunga la curva di assetto arancione. e basta.
Questo significa che, per equilibrare la maggiore Ay, cioè la maggiore forza trasversale, siccome la reazione la faccio col pneumatico, DEVO dare un angolo di deriva dell'asse posteriore MAGGIORE, che corrisponde a un maggiore angolo di assetto ().
Quando abbiamo iniziato a parlare della madre di tutte le formule della dinamica del veicolo, se vi ricordate, abbiamo fatto l’ipotesi (tra le altre) che avremmo guardato il comportamento di avantreno e retrotreno SOLO fin dove il pneumatico mantiene un comportamento lineare. Questo significa che, come sappiamo ormai bene, stiamo al di sotto di 0,4g (ossia circa 4 m/s2) di accelerazione trasversale (Ay). Ossia, detto in altre parole, la nostra accelerazione trasversale NON deve superare gli 0,4g. in pratica, se vado a prendere il mio grafico Fy-α che lega la forza trasversale che il pneumatico è in grado di generare in funzione dell’angolo di deriva, significa che mi tengo nella zona in cui la curva si mantiene rettilinea.
Bene. rimuoviamo questa ipotesi e vediamo cosa succede se vado oltre gli 0,4g.
Non considerate cosa succede all’avantreno (lo vedremo più avanti): concentratevi solo sul retrotreno.
Prendete la vostra curva di assetto, per esempio quella che allego qui sotto.
Adesso è rettilinea. Attenti bene: la curva di assetto lega il β in funzione della Ay che raggiunge la macchina (la bicicletta, nel nostro caso), o meglio il retrotreno che, come abbiamo detto, risente del tipo di pneumatici, delle forze che agiscono sul pneumatico (che a loro volta dipendono dalla rigidezza delle sospensioni, dal trasferimento di carico, etc etc ivi comprese eventuali forze di trazione nel caso noi parlassimo di vetture a TP) attraverso la formula che ben conoscete (una delle 2 formule che sono la “madre di tutte le formule”):
= l/R – (Mr/Cr)*Ay.
Invece, nel grafico forza-deriva, la forza generata dal pneumatico Fy è funzione solamente dell’angolo di deriva.
Bene. come vedete dalla curva di assetto, questa si mantiene rettilinea fino a circa 2g di Ay.
Questo significa che le caratteristiche del retrotreno della mia macchina (tipo di pneumatici usati, eventuali ripartizioni di barra, forze normali che agiscono sul pneumatico etc) mi consente di far lavorare le gomme che ho scelte, la cui caratteristica potrebbe essere quella che vi allego qui sotto, nel tratto rettilineo della loro curva Fy-α. Ossia, sempre riferendoci al grafico qui sotto, diciamo fino a circa 4 gradi di angolo di deriva α.
Tanto per chiarirvi il concetto (guardate il grafico precedente a questo): la macchina si sta muovendo (su una traiettoria circolare) in modo tale che il valore di β che il CG (baricentro) assume è pari a -10 gradi a 2g di accelerazione trasversale. Significa che la velocità V del baricentro CG sarà tale da formare con l’asse vettura un angolo di 10 gradi verso l’esterno.
A questo valore di β corrisponde un certo valore di deriva dell’asse posteriore (α) (che dipende dal semipasso posteriore, dal raggio di curvatura, etc) che, presumibilmente, sarà al massimo di 4 gradi, considerato che i pneumatici montati sono quelli corrispondenti al grafico qui sotto e che ho detto che siamo nella zona rettilinea.
Se continuo ad accelerare, vedo che al crescere di ALFA la mia forza Fy generata dal pneumatico NON è più proporzionale ma comincia a scostarsi dalla proporzionalità (guarda il grafico Fy-α del pneumatico). quindi, avrò bisogno di più angolo β (per avere più angolo α posteriore).
La curva piega quindi verso il basso per le ragioni su esposte.
Dunque, avrà una forma come quella disegnata qui sotto (per esempio, la curva indicata con 1):
Adesso, se lavoraste per fare la messa a punto di una macchina che poi dovrà andare in serie, preferireste che la vostra curva di assetto facesse come la curva 1, oppure come la curva 2? Perché?
Risposta: Di serie la 2, da gara la 1.
La 2 inizia prima e più progressivamente ad assettarsi e quindi comunica prima che si sta arrivando al limite, ma ha un limite più basso.
Per ottenere l’una e l’altra, i parametri su cui lavorare sono:
- Tipologia di pneumatico;
- Peso sull'asse posteriore;
- Trasferimento di carico.
Steering pad.
Facciamo un brevissimo excursus sulla prova pratica che traduce il concetto di fare una curva in condizioni stabilizzate.
Ci si pone su uno "steering pad", che è semplicemente un piazzale piano molto ampio su cui posso mettermi a percorrere una traiettoria circolare (di raggio R).
Generalmente, fino a poco tempo fa, erano 2 i raggi R che si consideravano: uno di 40 metri, l'altro di 100 metri (oggi si fanno prove differenti, ma noi non interessa entrarvi più di tanto nel merito).
il concetto è quello di tenermi sulla traiettoria di raggio R e percorrerla in condizioni stabilizzate e poi di far crescere la mia AY semplicemente modificando la mia velocità longitudinale V (per ottemperare alla famosa formula Ay = V2 / R).
Così "spazzolerò" tutti i valori di Ay, da 0 fino al massimo Ay che può raggiungere la mia macchina.
In pratica, come si fa?
Semplice, mi metto con la giusta marcia (di solito in II o in III, dipende da che raggio R devo percorrere, se 40 o 100 m; e dalle prestazioni che la mia macchina è in grado di fornire... Comunque, nel 99,99% dei casi, le marce sono quelle) e, partendo dalla minima velocità di sostentamento del motore (cioè, per esempio, in II mollo la frizione e lasci trascinare il motore. questa è la condizione di trascinamento...), incomincio a percorrere la mia traiettoria. Faccio un giro e poi incomincio ad accelerare LENTAMENTE in modo cioè che la mia accelerazione longitudinale rimanga trascurabile. E’ chiaro che, al crescere della velocità, cresce anche Ay e quindi, se voglio rimanere in traiettoria (DEVO rimanere in traiettoria se voglio fare bene la prova) sarò costretto a girare di più il volante. E così via: vado più veloce, cresce Ay, do più angolo volante... Fino a quando non riuscirò più a tenere la macchina sulla traiettoria (o perché scivola col muso o perché parte di coda).
Chiaramente, durante tutta la prova, vengono acquisiti tutti i parametri che mi servono (Ay, velocità, angolo volante, β, , β', ’, - theta -, ’, etc) attraverso accelerometri, sensori GPS e piattaforme giroscopiche stabilizzate.
Le prove, più di una per avere una buona precisione statistica, vanno eseguite in un senso e nell'altro (girando a dx e a sx).
:grazie) alfistavero