Analisi dell’asse anteriore.
Passiamo a vedere l’anteriore; e a metterlo poi in relazione col posteriore.
Per l’anteriore, come immaginerete, la formula è questa qui sotto:

Qui, invece dell’angolo di assetto c’è l’angolo di sterzo vol. Attenti bene: quando dico (e basta) è l’angolo di sterzo alle ruote. Quando scrivo vol mi riferisco all’angolo di sterzo al volante (ossia, proprio di quanti gradi giro il volante). Lo so che l’ho già detto: ma è utile ripeterlo.
Quello che mi preme sottolineare, invece, è il fatto che anche in questo caso, come già per la formulazione dell’angolo di assetto , la formula sia la somma di due parti, di due componenti.
C’è una parte COSTANTE che è il mio vol0; e poi c’è una parte che varia con l’accelerazione trasversale Ay.
La parte costante, quella indicata con vol0, prende il nome di sottosterzo cinematico (come nell’altra formula c’era l’assetto cinematico). Cos’è? Semplice: è l’angolo di sterzo che, come minimo, devo dare alle ruote anteriori (alla ruota anteriore, se mi riferisco alla semplificazione del “modello a bicicletta” che utilizziamo) per poter effettuare una sterzatura cinematica, ossia –come sappiamo- SENZA derive.
Attenti bene: se consideriamo il modello a bicicletta, questo angolo di sottosterzo cinematico ha UNO e UN SOLO valore. Che è poi l’angolo che vedete nella figura che vi ripropongo qui sotto e che comporta che il centro di istantanea rotazione sia O’ (quindi, ci stiamo riferendo ai segmenti tratteggiati).
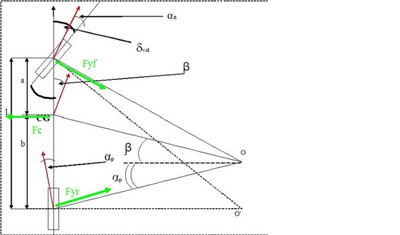
Ma….se sto considerando una macchina vera? Se voglio una sterzatura VERAMENTE cinematica, so bene che devo considerare DUE angoli: quello della ruota interna e quello della ruota esterna. E questi due angoli NON sono uguali, ma diversi. Per farli uguali, DEVO commettere un errore. Ora, se mi riferisco alla ruota esterna (che è quella che “guida” di più in curva…..diciamo così, tanto per farci capire), mettere l’angolo della ruota interna uguale alla esterna significa farle commettere un errore….che si chiama….ACKERMANN….(guarda caso!!!). Ecco perché, questo vol0 prende anche il nome di….ANGOLO DI ACKERMANN!
In sostanza, però, qual è il significato fisico di vol0?
Semplice. Se guardate la formula vol0 è pari al rapporto tra il passo L e il raggio di curvatura (chiaramente, tutto moltiplicato per il rapporto di demoltiplicazione dello sterzo TAU ). Mi dice, in sostanza, che quanto più la macchina è lunga, tanto più dovrò girare le ruote per poter fare la curva di raggio R. pensate, tanto per fare un esempio ****Edit da STAFF: alla prossima account sospeso!, ad un pullman e a una Panda. Per fare la STESSA CURVA, il pullman che è molto ma molto più lungo, dovrà girare (sterzare) le ruote davanti di più della panda. Ma i due conducenti (quello del pullman e quello della Panda) dovranno, in pratica far ruotare il volante dello stesso numero di giri? In teoria NO. In teoria. Basta infatti che il pullman abbia un valore di molto ma molto MINORE perché i due guidatori ruotino il volante dello stesso numero di giri (dello stesso angolo). Chiaro, però, che per un sacco di motivi questo non avvenga mai. Ma in teoria, si può fare.
Andiamo avanti e vediamo il secondo termine. Questo è composto dal prodotto di una parte “costante” (per così dire…), indicata da KUS, e da una parte variabile, l’accelerazione trasversale Ay. In pratica, è lo stesso del gradiente di assetto. Solo che qui, invece del gradiente di assetto KBETA, ho il KUS.
Il KUS prende il nome di GRADIENTE DI SOTTOSTERZO!
Attenti bene: il gradiente di sottosterzo NON è come il gradiente di assetto; cioè, se guardate l’espressione del gradiente di assetto, questo dipende SOLO dal rapporto tra la quota di peso (massa) al posteriore Mr divisa per la rigidezza di deriva del posteriore Cr. Qui, invece, è la DIFFERENZA tra la massa che compete all’anteriore (Mf) divisa per la rigidezza di deriva dell’anteriore (Cf) e la massa che compete al posteriore (Mr) divisa per la rigidezza di deriva del posteriore (Cr). In altre parole, è una formula che mi traduce il fatto che il comportamento dell’auto è conseguenza dell’equilibrio tra avantreno e retrotreno (ma guarda un po’…e chi l’avrebbe detto?).
Peraltro, vi prego di notare che quella parte di KUS che si riferisce al posteriore, ossia Mr/Cr, altro non è se non…..il gradiente di assetto! Quindi, il mio KUS è – consentitemi la licenza ma serve per farvi capire - la differenza tra un qualche “gradiente” che traduce la presenza dell’avantreno e il gradiente di assetto; l’interazione tra questi due, la loro reciproca influenza.
Ora, siccome il KUS è una differenza tra due cose, a seconda che uno dei due addendi (rispettivamente Mf/Cf e Mr/Cr) sia maggiore dell’altro (o, al limite, uguale all’altro), avrò che:
KUS > 0
KUS < 0
KUS = 0
Se:
KUS > 0 si dice che il veicolo è sottosterzante
KUS < 0 il veicolo sarà sovrasterzante
KUS = 0, allora il comportamento del veicolo è neutro.
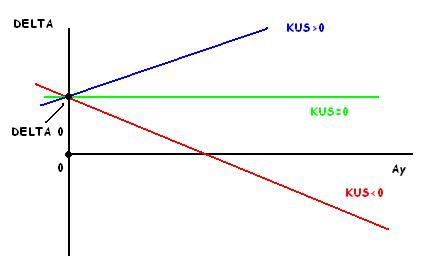
Rimanendo nel campo LINEARE del funzionamento del pneumatico, quale sarà l’andamento della “curva di sottosterzo” nei tre casi? Ossia, siccome l’espressione della “madre di tutte le formule” (la curva di sottosterzo) lega , cioè l’angolo volante, al valore dell’accelerazione trasversale Ay e di un coefficiente angolare (che abbiamo chiamato KUS e che abbiamo visto da cosa dipende), nei tre casi (>0, <0, =0) come sarà la curva (meglio, la retta)?
- Per KUS>0 avrò una retta che va verso l'alto: all'aumentare di Ay aumenta (o vol).
L'auto e' sottosterzante quindi all'aumentare di Ay devo "chiudere" col volante per mantenere costante R.
- Per KUS<0 la retta va verso il basso, l'auto e' sovrasterzante e all'aumentare di Ay devo "aprire" col volante per mantenere R.
- Per KUS = 0 significa che le forze trasversali generate dall'anteriore e dal posteriore, le Fy, sono uguali. Al crescere di Ay il mio angolo volante non cambia: cioè non ho bisogno di incrementare vol, di girare di più il volante: mi basta tenerlo fermo. In pratica, l'equilibrio tra anteriore e posteriore è tale che, al crescere di Ay, davanti cresce la mia forza Fy e anche Fy posteriore, ma MENO di quanto non cresca davanti (in modo da mantenere sempre l'equilibrio tra l'anteriore e il posteriore) tanto da compensare lo spostamento del centro di istantanea rotazione O (che si sposta perché cambiano le derive). Quindi le derive (anteriore e posteriore) complessive dei due assi sono uguali (rispetto al suddetto centro di istantanea rotazione O).
Graficando le tre condizioni (e supponendo che la macchina sia sempre la stessa, quindi sono uguali il passo, la posizione del baricentro e la curva, cioè R) avremo:
Quindi, fissato il raggio della nostra curva, se (lentissimamente) acceleriamo avviene che:
- KUS>0 vuol dire che più accelero più devo sterzare;
- KUS<0 vuol dire che più accelero meno devo sterzare;
- KUS=0 vuol dire che anche accelerando posso tenere fermo il volante.
Poi vedremo perché i casi KUS = 0 e KUS < 0 (ossia macchina sovrasterzante o, al più, neutra) sono da EVITARSI! La macchina deve sempre essere sottosterzante, anche le F1.
Per spiegare il perché del comportamento sottosterzante (cioè con KUS>0) bisognerebbe introdurre due grandezze che, magari, analizzeremo molto più in là.
Le due grandezze sono il guadagno di accelerazione trasversale, definito come il rapporto tra Ay e vol (quindi: Ay/vol) e il guadagno di velocità di imbardata, definito come il rapporto tra la velocità di imbardata PSIP e vol (quindi: PSIP/vol).
Ora, se guardate l’espressione di queste due formule, vedrete che dipendono dal gradiente di sottosterzo KUS
Eccole:
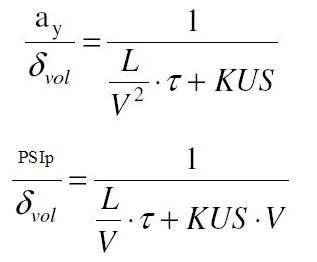
Dalla madre di tutte le formule abbiamo visto che il comportamento dell’auto, sia esso sottosterzante (KUS>0) o sovrasterzante (KUS<0), dipende moltissimo dalla velocità di percorrenza della curva (la mia V), perché l’accelerazione Ay è funzione della mia velocità V al quadrato. Il caso di comportamento neutro (KUS=0) è invece differente: l’angolo di sterzo è sempre COSTANTE e vale L/R (Ackermann)!
Ora, il livello di sottosterzo viene anche identificato da una velocità detta velocità caratteristica, che è la velocità necessaria per ottenere, all’incirca, una sterzata (un angolo di sterzo) pari al DOPPIO dell’angolo di Ackermann (siccome è
vol = (L/R + KUS (V^2/R))*, e vol deve valere 2L/R, allora sarà V^2 = L/K con K>0).
La velocità caratteristica di un veicolo sottosterzante è quella particolare velocità alla quale l’angolo di sterzo necessario per seguire una data traiettoria è il doppio dell’angolo di Ackermann (ossia dell’angolo di sterzo cinematico).
Nel caso di veicolo sovrasterzante, invece, l’angolo di sterzo deve diminuire. E scende, pure lui, col quadrato della velocità. E arriva a zero (0), cioè interseca l’asse delle ascisse, con una certa velocità, detta “velocità CRITICA”. Ora, attenti bene a non confondere questa velocità critica con la velocità critiche che abbiamo definito tanto tempo fa quando abbiamo parlato del pneumatico. Sono due velocità completamente differenti!
In questo caso, la velocità critica di un veicolo sovrasterzante è V^2 = L/(-K). Ho scritto (-K) perché K è minore di 0.
Quindi, la velocità critica è quella velocità alla quale il guadagno di velocità di imbardata diventa infinito. Detto in altre parole: basta una minima perturbazione perché la macchina si ribalti!
Ecco perché si fanno veicoli sottosterzanti e non sovrasterzanti (oltre al fatto che la correzione di un sovrasterzo è una manovra totalmente innaturale per il 99% dei “piloti”): perché alla “velocità critica” basta un niente perché l’auto diventi, di colpo, ingestibile.
Tanto per fare un discorso più semplice: pensiamo di avere un veicolo in marcia rettilinea a cui applichiamo, nel baricentro CG, una forza laterale. Se il veicolo è neutro la traiettoria seguita sarà sempre rettilinea (anche se con una certa “deriva” rispetto alla traiettoria iniziale); mentre se il veicolo è sottosterzante o sovrasterzante, avrò due comportamenti distinti. Se sottosterzante, tenderà a deviare e ad aumentare la deriva del baricentro (cioè l’angolo di assetto β); se sovrasterzante, invece, diminuirà l’angolo di deriva del baricentro, ossia l’angolo di assetto β, fino ad annullarsi e poi ad invertirsi (diventare negativo) e, da lì continuare a crescere. Quindi, la condizione di sovrasterzo è una condizione di instabilità - come dire - “endemica”, naturale.
Chiaro poi che la condizione di neutralità è sicuramente da evitare; sia perché non consente di avere un buon “feeling” con il limite, sia perché è molto facile passare, dalla neutralità, alla condizione di sovrasterzo (che, come detto, va evitata assolutamente).
Tanto per farvi qualche esempio:
- Nel primo grafico, abbiamo l'andamento del guadagno di imbardata in un veicolo sottosterzante:
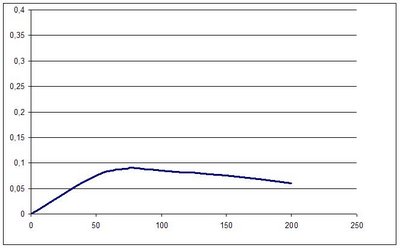
- Nel secondo grafico è riportato l'andamento del guadagno di imbardata (in funzione della velocità) in un veicolo sovrasterzante:
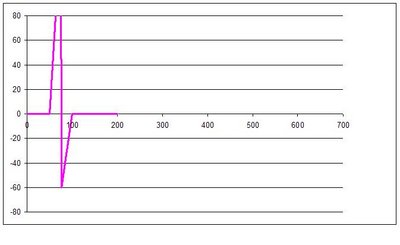
Come vedete, alla "velocità critica" il veicolo sovrasterzante "parte" senza alcuna possibilità di recupero (la velocità tende ad infinito; ha una discontinuità); invece il veicolo sottosterzante ha solo un "massimo" (assoluto).
Qualcuno più attento mi chiederà quale relazione ci sia tra la velocità di imbardata (PSIp) e l'accelerazione trasversale (Ay).
Ecco la relazione che intercorre tra PSIp, Ay e p (velocità di assetto):
Ay = V * PSIp + V * p = V (PSIp + p)
Nel caso che consideriamo noi, ossia di steering pad a raggio costante, p (cioè la velocità di assetto) è nulla perché abbiamo supposto che stiamo percorrendo la curva praticamente a velocità costante. Quindi, è costante e la sua derivata = 0. La formula diventa:
Ay = V * PSIp
Consideriamo il caso di veicolo sottosterzante, quindi con KUS>0.
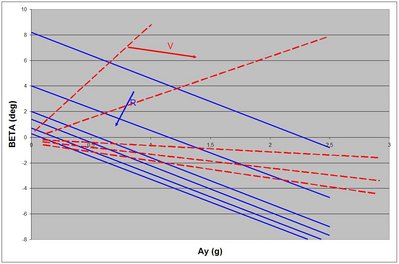
Posto due grafici. Il primo è il grafico che lega l’angolo volante vol con l’accelerazione Ay.
Il secondo lega con Ay.
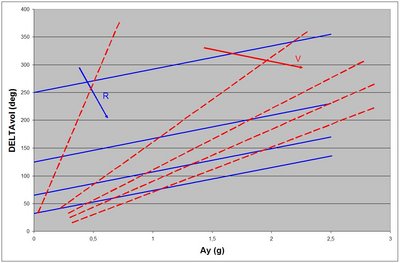
Il primo è il grafico della “curva di sottosterzo”; il secondo è il grafico della “curva di assetto”.
Consideriamo, per ora, solo la zona in cui i pneumatici lavorano nella loro zona di funzionamento lineare. Considerate 1 sola retta su ciascun grafico, corrispondente ad un ben preciso raggio di curvatura R.
Sulla curva di sottosterzo, vedete che al crescere dell’accelerazione Ay (quindi, se aumento la velocità di percorrenza della curva a parità di raggio di curvatura R) aumenta l’angolo VOL di cui devo ruotare il volante. Parimenti, nel grafico inferiore (sulla curva di assetto), al crescere di Ay il posteriore deve “compensare” l’aumento di forza centrifuga con una crescita dell’angolo di assetto .
Ora, finché il posteriore mi offrirà “appoggio”, ossia sarà in grado di generare forza trasversale per compensare l’aumento di forza centrifuga data dall’aumento di accelerazione trasversale (e, per farlo la macchina dovrà aumentare il proprio assetto , perché SOLO COSI’ potrà fare aumentare l’angolo di deriva del posteriore), la mia curva di assetto avrà l’andamento che vedete in figura; e, parimenti, finché l’anteriore sarà in grado di generare forza trasversale per compensare l’aumento di forza centrifuga della parte anteriore data dall’aumento di accelerazione trasversale (e, per farlo dovrò girare il volante, perché SOLO COSI’ posso aumentare l’angolo di deriva dell’anteriore), la curva di sottosterzo avrà l’andamento che vedete nella figura.
Dalla formula che esplicita il KUS, ossia dalla relazione (Mf/Cf – Mr/Cr), mi sembra chiaro che, se “irrobustisco” il posteriore, cioè lo rendo più “potente”, più in grado di “assorbire” forza trasversale, più in grado di generare “spinta” trasversale per compensare la quota di forza centrifuga che gli compete, cambio ENTRAMBE le curve.
Infatti, cambio la curva di assetto perché cambio il KBETA, il gradiente di assetto (che è Mr/Cr), che diventerà dunque MENO INCLINATA.
Ma cambio pure KUS, il gradiente di sottosterzo, ossia (Mf/Cf – Mr/Cr), perché la differenza tra i due termini (quello che esprime l’anteriore e quello che esprime il posteriore che, guarda caso, coincide con il KBETA) mi farà cambiare la pendenza della curva di sottosterzo, rendendola……PIU’ INCLINATA.
Viceversa, se modifico solamente l’anteriore, per esempio “irrobustendolo”; oppure rendendolo meno in grado di assorbire forza trasversale, la modifica influirà solo sul KUS, perché tocco il rapporto Mf/Cf; ma Mr/Cr rimane uguale. Ossia, rimarrà uguale il KBETA! A questo punto, potrei trovarmi nella condizione di avere un avantreno molto performante, cioè in grado di assorbire grandi spinte laterali (ossia, in grado di generare grandi forze trasversali con poco angolo volante, quindi con una pendenza della retta KUS poco inclinata); mentre, col retrotreno, di non essere altrettanto “performante”, quindi con una pendenza della retta KBETA molto inclinata. Ora, se questo set up può essere tollerato per le accelerazioni Ay medio- basse, cosa potrebbe succedere quando vado su con l’Ay, ossia vado più forte, in virtù del fatto che, adesso, sappiamo bene come “satura” la curva di assetto?
Insomma, vi ricordate quando, molto prima di queste discussioni, vi dicevo che è il retrotreno che “guida” la macchina; che, per fare un buon lavoro, bisogna partire sempre dalla messa a punto del posteriore; che, se si deve cambiare qualcosa, occorre tenere bene presente il comportamento del retrotreno? Ecco.
Adesso, qui in questi grafici, ho aggiunto anche le curve che descrivono i casi in cui si vari R (cioè il raggio di curvatura) e in cui si vari la velocità V (tracciando i segmenti tratteggiati “iso-velocità”). Anche per il caso della curva di sottosterzo, vale quello che abbiamo detto qualche tempo fa quando parlavamo di . Ossia, che al variare di R varierà solo il mio “sottosterzo geometrico”, o Ackermann (il rapporto l/R, cioè passo diviso raggio di curvatura); mentre, come potete vedere dai segmenti tratteggiati, se vado a bassa velocità, per impegnare la macchina in alte accelerazioni trasversali, dovrò girare molto il volante, mentre all’aumentare della velocità mi sarà richiesto sempre meno angolo volante per “andare su” con l’accelerazione trasversale (= impegnare tanto la macchina).
Domanda: come faccio se voglio "irrobustire" l'anteriore? e il posteriore?
Vediamolo con un esempio pratico.
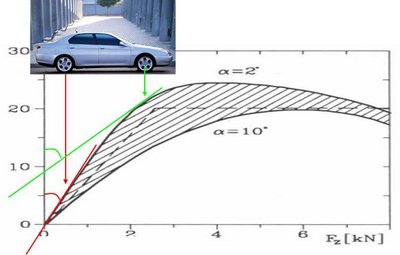
Ho preso la foto di una 166 perché è l’unica ripresa laterale di una vettura che sono riuscito a trovare. Se vi piace di più, fate conto che al posto della 166 ci sia la 147, ma il discorso non cambia.
Il KUS è la differenza tra Mf/Cf e Mr/Cr, ossia la differenza del rapporto tra massa e rigidezza di deriva anteriore MENO il rapporto tra massa e rigidezza di deriva posteriore.
Ma vi ricordate cosa abbiamo detto del rapporto M/C quando abbiamo parlato del KBETA?
Abbiamo detto che, a meno dell’accelerazione di gravità, questo rapporto non è altro se non il coefficiente angolare (rispetto all’asse delle ordinate) della curva che lega la rigidezza in deriva in funzione della forza normale (che, nel caso di macchina che giace su un piano, coincide con la forza peso che compete a quell’asse).
Bene, qui è lo stesso.
Consideriamo, dunque, una macchina con il baricentro CG spostato in avanti. Per esempio, una vettura TA come la 166. o come la 147. o quello che volete voi. Una macchina che abbia 4 ruote UGUALI.
Se facciamo il ragionamento suesposto per la macchina, e consideriamo che l’asse anteriore è quello più pesante, vediamo che “naturalmente” l’asse anteriore ha un rapporto M/C (quindi, il mio Mf/Cf) MAGGIORE rispetto al rapporto M/C del posteriore (cioè l’ Mr/Cr). Lo vedete che l’angolo “verde” è maggiore dell’angolo “rosso”? quindi, la mia macchina sarà, per definizione, UNA VETTURA SOTTOSTERZANTE, perché il KUS non potrà che essere POSITIVO. Non c’è nemmeno bisogno di provarla su strada, per capirlo! Già da ferma, voi sapete dire che è una macchina sottosterzante.
Quindi, come potrei fare per renderla più o meno sottosterzante; o, al limite, sovrasterzante?
Semplicissimo:
1- modificando la rigidezza di deriva dei pneumatici, e mantenendo la medesima distribuzione dei pesi. basta solo che cambi le ruote dietro, e le metta più LARGHE e avrò una vettura più sottosterzante. Se, invece, le mettessi davanti, ridurrei il KUS e, al limite, arriverei ad avere una macchina con KUS<0!
2- Cambiando le pressioni dei pneumatici (di parecchio). Come sapete, infatti, la pressione del pneumatico influenza molto la rigidezza di deriva C. e la curva che descrive questo andamento ha -guarda caso- un andamento molto simile a quello della curva Fy-α (quindi, con una crescita iniziale; una zona di massimo e poi una più o meno marcata diminuzione. La zona di massimo, diciamo che, il più delle volte, è nell’intorno dei 2 bar….circa). quindi, che so, potrei abbassare parecchio la pressione delle ruote dietro e avrei una macchina sovrasterzante (KUS negativo): oppure, potrei gonfiare quelle davanti a 3 bar e avere + sottosterzo….e via così
3- Potrei cambiare la distribuzione dei pesi. Metto nel baule 4 sacchi di cemento e la macchina abbasserà sicuramente il KUS.
4- Cambio le ripartizioni di rigidezza equivalenti. Che so, metto una barra da 50 mm dietro e vedrai che bei sovrasterzi!!!!
Insomma, ci si può sbizzarrire!
Alla luce di quanto detto fino a qui:
1- capirete benissimo che frasi da veri “teNNici” come quelle che mi capita di leggere su molte riviste specializzate del tipo: “…la BMW ha così ottenuto una distribuzione di pesi praticamente ottimale: 50% sull’avantreno e 50% sul retrotreno…” lasciano il tempo che trovano. CHE SIGNIFICA UNA DISTRIBUZIONE DEI PESI 50 E 50? Se non ho una gommatura differenziata e non lavoro sulle rigidezze (barre, etc), significa solo che tendo al KUS=0,
CHE EQUIVALE A UNA SONORA FESSERIA (come abbiamo visto);
2- farete meno fatica a capire perché le Porsche 911, soprattutto quelle più vecchie, non erano molto apprezzate dai neopatentati. Tenete conto che le prime 911 avevano una gommatura praticamente simile davanti e dietro. Solo a metà degli anni ’70 la Porsche ha incominciato a lavorare seriamente sulla dinamica laterale della 911;
3- comprenderete appieno il significato di quella frase riguardo la Lamborghini Miura e che viene fatta risalire all’allora capo collaudatore delle Lamborghini (Bob Wallace) che diceva che la Miura, nelle curve ad alta velocità, tendeva a “sovrasterzare improvvisamente”.. e che solo in seguito, con l’introduzione di nuovi pneumatici (Pirelli, mi pare; e mi pare di misura differenziata), erano riusciti a porvi - in parte – rimedio;
5- avete capito perché la Smart ha la gommatura differenziata tra l’anteriore e il posteriore. NON è perché ha la TP. E nemmeno perché ha molti cavalli (ma dove?). Ma perché è corta, e ha il CG spostato al posteriore!
6- supponete di essere proprietari BMW X6. In allestimento standard, la X6 (come molte altre BMW) esce con gommatura identica davanti e dietro (e su questa gommatura base viene fatto tutto lo sviluppo da parte della casa). Voi, però, vi sentite molto più fighi e scegliete la versione sportiva, con tanto di “assetto” e gommatura differenziata. Significa: maggiori rigidezze (e barre più grandi…davanti) e gomme più larghe dietro (quindi, con maggiore rigidezza di deriva al posteriore). Ma la distribuzione dei pesi è sempre quella.
Domanda: sarà più sottosterzante la X6 “normale” o la X6 “con l’assetto”?
Adesso, tanto per “saggiare” quanto ci capisca il “cliente tipo” di una BMW del genere, se conoscete qualcuno che ha una X6 con l’assetto provate a chiedergli se trova la sua X6 “assettata” più o meno sottosterzante rispetto a una X6 normale (qualora l’avesse mai provata).
Prima di andare avanti, vi invito a dare un'occhiata ai due grafici qui sotto
Sono rappresentate la curve di sottosterzo (non ancora in forma definitiva) e la curva di assetto (questa sì, definitiva: considerate la curva continua rossa che piega poi verso il basso).
Per prima cosa, vi invito a guardare, nei due grafici, i valori di Ay in cui sono tratteggiate le curve. Vedrete che, nel caso della curva di sottosterzo, arriviamo al massimo a 1 g; nel caso di , invece, siamo al doppio. Chiaramente, la cosa non è proprio realistica, ma insomma....quasi. Serve più che altro per dirvi che, in una macchina ben fatta, i limiti di aderenza del posteriore devono essere ben più alti dell'anteriore, in modo che si possa avere un comportamento "sano" e che la vettura "saturi" prima davanti. altrimenti, sono guai.
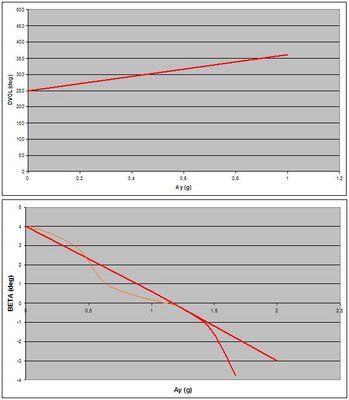
In più, vi inviterei a guardare la curva BETA. ho tracciato anche un andamento NON LINEARE (tratto arancione). chiaramente, anche in questo caso, le cose nella realtà non sono proprio così. ma fa niente. l'importante è capirsi.
Bene: supponete che la curva di assetto della macchina che stiamo considerando sia questa (cioè tratto arancione + tratto rosso e curva verso il basso). supponiamo che sia vera. Significa, come detto, che la macchina, al variare di Ay, continua a recuperare (e cedere) assetto, indice di scarsa linearità sull'assetto.
Quindi il comportamento lineare (la risposta lineare del pneumatico) rimane tale SOLO fino a valori di Ay di circa 0,5 g
Adesso, supponendo che il posteriore sia sufficientemente "buono" (e lo diamo per scontato), vediamo come potrebbe evolvere la mia curva di sottosterzo al crescere dell'accelerazione trasversale.
La saturazione della curva avverrà (ed è così per le auto stradali) intorno a 1g e poco prima della saturazione della curva di assetto BETA.
Il caso reale è questo:
Come vedete, entrambe le curve saturano quasi nello stesso momento, ma l'anteriore satura prima.
E’ chiaro che tanto più una macchina sarà considerata progressiva quanto più si discosterà dalla linearità già da medie accelerazioni (0,4 g circa).
tanto meno progressiva, invece, verrà considerata quanto più il distacco dalla linearità sarà portato in avanti, vicino alla saturazione.
L’esempio dell’Audi TT
Veniamo al caso Audi TT.
Quando uscì, la 156 fece un certo scompiglio presso le case concorrenti; in modo particolare per quanto riguardava l'handling. la 156 (e la 147) hanno rappresentato una Milestone per la concorrenza. I guadagni sterzo (adesso sapete cosa sono) e le caratteristiche handling della 156 hanno rappresentato un vero e proprio elemento di "rottura" con tutto quello che c'era prima. Figuratevi che, tanto per dirne una, la BMW, ancora adesso, porta in Svezia (sulla pista di prova dove svolge le proprie sessioni invernali) due 147 (prima serie) come riferimento per le proprie macchine di adesso.
La 156 ha fatto scuola (e la farebbe ancora). anche all'Audi sono rimasti piuttosto sorpresi.
L'Audi TT, è uscita qualche mese dopo (6 mesi dopo, mi pare)
Chiaro che, all'Audi, si saranno detti: facciamo una macchina sportiva e rischiamo di fare una macchina con un comportamento meno sportivo di quello di una berlina (della concorrenza)?
Insomma, per farla breve: dopo qualche tempo, furono segnalati dei casi di vetture che, all'improvviso, uscivano di strada, volavano fuori strada. soprattutto in Germania. roba da far tremare anche i più affidabili tecnici tedeschi.
Cos'era successo?
Dovete sapere che la TT aveva un set up di sospensioni e gomme che comportava delle curve di sottosterzo e di assetto come quelle che vi ho disegnato sopra. In pratica, del tutto poco progressive. Ossia, la macchina dimostrava un'ottima resistenza al sottosterzo, un buon gradiente di sottosterzo (e di assetto); nella zona lineare a medio bassa accelerazione (quella che normalmente viene indicata come sottosterzo "geometrico") era molto buona. e si manteneva buona anche alle accelerazioni medio-alte. diciamo fino a circa 0,75/0,8 g.
Solo che poi, la saturazione avveniva in maniera molto repentina. era un comportamento assolutamente sportivo. fin troppo sportivo. quasi da macchina da corsa. Insomma: teneva, teneva, teneva; fino quasi al limite. e poi, perdeva aderenza d'improvviso.
Seconda cosa: quella forma lì, quella della TT, come quella del maggiolino (e di tutte le macchine in genere), è una forma assolutamente "portante" dal punto di vista aerodinamico. e la portanza è direttamente proporzionale al quadrato della velocità. Perciò, ad alta velocità (come quelle che si tengono in Germania: ecco perché gli incidenti avvenivano soprattutto in Germania), il carico verticale al posteriore si riduceva TANTISSIMO.
ora, voi sapete benissimo che la forza trasversale che contrasta la forza centrifuga può generarsi solo se ho forza verticale (peso) che "schiaccia le gomme a terra". Se non si genera forza verticale, non si può neanche generare forza trasversale. mi sembra chiaro. e se la forza verticale è bassa, cosa succede al posteriore? succede come nel caso che abbiamo visto qualche tempo fa: poca capacità del posteriore di assorbire forze trasversali ==> quasi una tendenza al sovrasterzo.
e abbiamo anche visto che un comportamento sovrasterzante NON è un comportamento STABILE per la macchina. Inoltre, la scarsa forza verticale comporta altrettanto scarsa generazione di forza trasversale.
Risultato: ad alta velocità, bastava una piccola perturbazione per generare instabilità. ed era proprio quello che succedeva. col risultato di far ribaltare la macchina.
quindi, 2 problemi per 1 casino.
Capiti i problemi, ecco le soluzioni:
1- cambiare la definizione aerodinamica della macchina: per ridurre la portanza hanno messo lo spoiler;
2- cambiare la m.a.p. sospensioni (tra l'altro in modo rapido): spostare l'equilibrio verso il sottosterzo (in modo molto evidente): cambiare la ripartizione di barra spostandola verso un sottosterzo accentuato. e modificare le caratteristiche dei pneumatici (rigidezze di deriva, rendendole più progressive).
E le cose sono migliorate.
Gradiente di sottosterzo e assetto, indice di sottosterzo e assetto.
Riprendiamo il disegno qui sotto, già postato.
Come vedete, ci sono 2 andamenti differenti nel modo con cui satura la curva di assetto, uno dei due è più progressivo dell'altro.
Fatta salva l'accelerazione massima raggiungibile (la curva 2 mostra un limite chiaramente inferiore della curva 1), cosa potrei fare per tradurre NUMERICAMENTE la maggiore progressività della curva 2 rispetto alla 1?
Per esempio, supponete che entrambe le curve raggiungano la medesima Ay massima. Come faccio per dare un numero che traduca la maggiore progressività?
Un modo sarebbe misurare l'area sottesa dalla curva (dal punto in cui inizio a discostarmi dalla linearità fino ad Ay max) dividendolo per la lunghezza stessa (magari, al quadrato...così dimensionalmente avrei un numero puro).
Oppure, proviamo a considerare la curva di sottosterzo. abbiamo detto che la dividiamo in due parti: la prima, lineare, fino a circa 0,4g; la seconda, NON lineare, da 0,4g fino ad Aymax.
La parte lineare avrà un'equazione del tipo Y = mx + n dove Y è il vol, m è il KUS, x l'Ay e n il vol0 (cioè l'Ackermann o angolo di sottosterzo cinematico).
La parte NON lineare posso approssimarla anche con una curva quadratica del tipo
Y = M x2 + N
dove:
Y vale sempre vol
x = Ay
M e N sono due coefficienti di interpolazione. a me però interessa M che potrebbe diventare il mio coefficiente quadratico di sottosterzo.
Stesso identico ragionamento per la curva di assetto.
Dobbiamo definire degli "indici" che ci dicono qualcosa riguardo la parte NON lineare delle curve di sottosterzo e di assetto:
- per la curva di sottosterzo, potremmo definire un indice che è uguale al rapporto tra il coefficiente quadratico dell'equazione che descrive la curva nella zona non lineare e il coefficiente lineare della zona lineare (ossia fino a 0,4g). in pratica, sarebbe IUS = M/m = M/KUS;
- per la curva di assetto, idem. ossia: un indice che è uguale al rapporto tra il coefficiente quadratico dell'equazione che descrive la curva nella zona non lineare e il coefficiente lineare della zona lineare (ossia fino a 0,4g). in pratica, sarebbe IBETA = B / KBETA. dove B sarebbe il coefficiente quadratico dell'equazione (del tipo BETA = B (Ay)^2 + Bo) che descrive la parte di curva di assetto non lineare.
Vediamo il significato fisico di questi coefficienti.
Cominciamo dal gradiente di sottosterzo KUS.
il KUS, in pratica, è una diretta espressione del margine di stabilità di una macchina. Un KUS basso significa che A BASSE ACCELERAZIONI (cioè fino a 0,4g) ho bisogno di modesti valori di angolo volante per mantenere la traiettoria.
Attenzione bene: tutti questi indici sono riferiti a curve (la curva di sottosterzo e la curva di assetto) che vengono misurate in condizioni stazionarie, quindi nel comportamento a regime della macchina e prescindono da ogni considerazione circa i transitori di risposta ai comandi impartiti con lo sterzo alla macchina... e anche alle variazioni di coppia motrice applicate.
Inoltre, il gradiente di sottosterzo KUS assume tanto più significato quanto più "scarse" sono le capacità di chi è alla guida della macchina; quanto più basse sono le capacità di sfruttare la macchina da parte del conducente, di sfruttare i limiti di manovra della vettura.
Un guidatore professionista, ad esempio un collaudatore, tende invece a riferire i propri giudizi soprattutto nelle manovre al limite e quindi, per questa categoria di guidatori, il KUS assume un significato abbastanza "sfumato". Insomma, diciamo che è più importante, per questo genere di guidatori professionisti, l'indice di sottosterzo IUS.
Comunque, un valore basso di KUS sottintende una esaltazione della manovrabilità della macchina (sintomo di buone qualità handling); però questo basso KUS deve andare di pari passo con bassi valori di KBETA e di IUS per evitare che la risposta dinamica della vettura sia estremamente scompensata (provate a pensare a una macchina che ha un basso KUS, cioè poco sottosterzo sul lineare, e un alto IUS o IBETA....insomma, pensate a qualcosa come all'Audi TT quando si ribaltava).
Diciamo che è un po' difficile generalizzare, ma bassi valori di KUS (ma bassi, eh) comportano giudizio sensitivi del tipo: difficoltà di manovra, tendenza della macchina a sovrasterzare, instabilità, etc. (chiaramente, tutto ciò in linea di massima, eh....e in funzione anche del KBETA...)... alla fine: guida impegnativa.
Elevati valori di KUS, invece, comportano giudizi del tipo: molto sottosterzo, manovrabilità limitata e anche risposta lenta della vettura...
Quindi, il KUS non deve essere mai eccessivo (né in un senso, né nell'altro)...in linea di massima.
Dopo il KUS, il gradiente di sottosterzo, c'è l'indice di sottosterzo (o IUS).
Come già detto, l'IUS sarebbe il rapporto tra il coefficiente quadratico (della curva di secondo ordine che descrive il tratto di curva di sottosterzo a partire da 0,4g) e il KUS; e, come già detto (pure questo), è un parametro, un coefficiente, che assume tanto maggiore importanza quanto maggiore è la capacità (l'abilità) del guidatore.
L' IUS è l'espressione della legge con cui l'attività di sterzo richiesta al guidatore si incrementa per il raggiungimento dei limiti di manovra della macchina.
Un IUS elevato comporta la tendenza della vettura ad essere assai meno sensibile agli input sterzo alle alte accelerazioni rispetto ai livelli inferiori. Non so se riesco a spiegarmi.
Avere un IUS alto significa che, man mano che Ay cresce, la mia macchina è sempre meno sensibile all'angolo sterzo: in pratica, devo dare sempre più angolo sterzo se voglio che faccia quello che chiedo (cioè stare sulla traiettoria).
Ora, questo decadimento della sensibilità della macchina a rispondere ai comandi sterzo con l'aumentare della Ay, riassunta nell'IUS, è strettamente legata alla percezione, da parte del guidatore professionista (professionista, eh....), come grado di sottosterzo della macchina.
per cui, un elevato valore di IUS comporterà giudizi del tipo: elevato sottosterzo, scarsa manovrabilità della macchina, etc.
Passiamo adesso alla curva di assetto e vediamo il “significato” del gradiente di assetto KBETA.
Come già sapete bene, o dovreste sapere bene, KBETA è il coefficiente angolare del tratto rettilineo della curva di assetto, quel tratto rettilineo compreso tra 0 e 0,4g.
KBETA indica la variazione dell’angolo di assetto (che, in pratica, per dargli un significato che possiate capire è l’angolo di deriva del baricentro CG della macchina) all’aumentare dell’accelerazione laterale Ay.
Il gradiente di assetto KBETA (che deriva dalla madre di tutte le formule) è il miglior indice della capacità del posteriore di “assorbire” la variazioni di carichi trasversali senza che queste variazioni comportino “scompensi” nel comportamento della macchina; scompensi (più o meno) avvertibili per esempio in presenza di transitori rapidi in manovra, ma anche in caso di perturbazioni esterne. Per esempio, provate a pensare a due macchine che stanno viaggiando su una strada con tanto vento laterale. Una delle due macchine, magari, in presenza delle raffiche di vento restituisce una sensazione di maggiore”instabilità” dell’altra. Ecco, questa macchina probabilmente ha una gradiente di assetto più elevato (in senso assoluto, perché poi c’è il meno davanti).
Perciò, valori di gradiente di assetto elevati (sempre in valore assoluto, eh…mi raccomando!) comporteranno giudizi del tipo: sovrasterzo nelle manovre, difficoltà di controllo, instabilità direzionale. Ma anche quella famosa “risposta in due tempi” che spesso contraddistingue la maggior parte delle auto in circolazione (anche se questo giudizio è legato pure ad altri problemi che affliggono il posteriore).
L’indice di assetto IBETA, invece, è definito esattamente nello stesso modo dell’indice di sottosterzo IUS, quindi come un rapporto.
Nel caso dell’ IUS, questo era il rapporto tra il coefficiente quadratico della curva quadratica (di secondo ordine) che descrive l’andamento della curva di sottosterzo nel tratto di Ay compreso tra 0,4g e Aymax e il coefficiente lineare della curva (della retta) nel tratto di Ay compreso tra 0 e 0,4g (che poi è il mio KUS).
Qui, nel caso dell’IBETA, è il rapporto tra il coefficiente quadratico della curva quadratica (di secondo ordine) che descrive l’andamento della curva di assetto nel tratto di Ay compreso tra 0,4g e Aymax e il coefficiente lineare della curva (della retta) di assetto nel tratto di Ay compreso tra 0 e 0,4g (che poi è il mio KBETA).
L’IBETA è l’espressione del modo con cui il posteriore assorbe i carichi trasversali quando la macchina si avvicina al limite di aderenza.
Quindi, un indice di assetto elevato (sempre in valore assoluto, eh!) comporta una elevata discontinuità nella deriva del posteriore quando si passa dai medi agli alti carichi trasversali: in pratica, è un indice che mi rappresenta il grado di prevedibilità del comportamento della vettura. Una macchina con un IBETA elevato è una macchina con un comportamento poco prevedibile (pensate all’ AUDI TT prima serie, quella che si ribaltava…ecco: quella TT aveva un IBETA molto elevato).
Tutto ciò, naturalmente, in linea di massima. Perché poi, oltre all’IBETA, entrano in gioco altri fattori.
Un IBETA elevato, infatti, può determinare un comportamento dinamico imprevedibile e pericoloso nei transitori dinamici solo in funzione di altri parametri della vettura, come per esempio, il momento polare d’inerzia della macchina, le variazioni di assetto dovute ai trasferimenti di carico tra anteriore e posteriore (se ho una macchina con tanto trasferimento di carico tra anteriore e posteriore, allora le cose peggiorano…) o le modalità con cui uso l’acceleratore (o meglio, la coppia motrice applicata/tolta alle ruote motrici, quindi i transitori di coppia), etc.
Comunque sia, valori elevati di IBETA (indice di assetto) comporteranno giudizi del tipo: difficoltà di controllo della macchina, macchina sovrasterzante al limite, tendenza la sovrasterzo al limite, macchina poco gestibile e guidabile al limite, etc.
Angolo e Gradiente di rollio
Finora abbiamo visto angoli di deriva, rigidezze in deriva, angoli di assetto e "rigidezze" di assetto (il gradiente KBETA, tanto per chiamarlo in un altro modo). iInsomma, è come se guardassimo la macchina dall'alto.
Però, la macchina si muove anche attorno ad altri assi. in particolare attorno all'asse di rollio che è quello longitudinale.
Anche per il rollio si può descrivere il moto a rollio riportando su un grafico la rotazione (attorno al CR, centro di rollio) della cassa, quindi l'angolo di rollio, in funzione dell'accelerazione trasversale Ay nella manovra di steering pad (quindi in condizioni stazionarie). insomma, oltre all'angolo volante vol e all'assetto , considero anche il rollio THETA . e lo riporto in un grafico in funzione di Ay.
Detto questo, mi sembra chiaro che il grafico della curva che lega l'angolo di rollio THETA all'accelerazione trasversale Ay non potrà che essere una retta (e basta: nessun allontanamento dalla condizione rettilinea perché il legame tra forza, cioè Ay, cioè momento di rollio, e deformazione, cioè rotazione della cassa, è lineare), semplicemente perché mi trovo in condizioni stazionarie (quindi, a pari forza trasversale ci sarà pari momento di rollio cui corrisponderà pari rotazione della cassa...).
Il coefficiente angolare di questa retta altro non sarà se non la rigidezza a rollio della mia macchina. e si chiamerà...gradiente di rollio, lo si indica con KTHETA
Questo gradiente consente di valutare l'entità del coricamento assunto dalla vettura in conseguenza del carico inerziale trasversale (cioè la massa applicata al CG moltiplicata per l'accelerazione trasversale Ay) durante le manovre; nello specifico, lo steering pad a raggio costante.
Ora, sulla percezione soggettiva, ossia sulla sensazione di "coricamento" della vettura, il gradiente di rollio ha grande importanza, senza dubbio. Ma, come vi ho detto parecchio (ma parecchio) tempo fa, a determinare questa sensazione concorre pure la velocità di rollio (quindi, tutto il discorso sugli ammortizzatori): velocità di rollio elevate significano moti di cassa pronti, anche in presenza di "forzanti" esterne casuali, con conseguente sensazione di un comportamento dell'auto di instabilità trasversale della vettura. Pensate, per esempio, al caso di una macchina molto morbida, che rolla molto: la sensazione è che non sia molto stabile, almeno trasversalmente (pensate a una vecchia Citroen, per esempio), anche se poi, magari, non è proprio così...
In ogni caso, elevati valori di gradiente di rollio comportano, quanto a sensazioni, giudizio del tipo: coricamento eccessivo, risposta dinamica della macchina ritardata (adesso, vediamo perché), riallineamento lento (ovvio!!!), manovrabilità scarsa.
Prima di andare avanti, vediamo la successione temporale degli eventi che accadono da quando giro il volante. ossia, cosa succede quando giro il volante? prima giro il volante, poi cosa succede?
Succede questo:
1- giro il volante. nasce un angolo di deriva che genera una forza trasversale anteriore che fa ruotare la macchina;
2- nasce un angolo di assetto e la macchina imbarca;
3- l'imbardata genera la deriva del posteriore;
4- si genera la forza trasversale Fy che agisce su CG;
5- la Fy genera il rollio;
6- la cassa termina di rollare e il transitorio si esaurisce. la somma delle forze trasversali generate da anteriore e posteriore equilibrano la Fy su CG.
Questo in condizioni ideali.
Mi sembra chiaro che quanto minore è il tempo che passa dal momento in cui giro il volante a quando la macchina "appoggia" (e quindi, ne percepisco l'appoggio), tanto migliore sarà la macchina.
Provate a pensare a una Citroen 2CV, macchina con tanto rollio: quando girate il volante vi sembra di andare in barca, e valutate la sensazione quando, per esempio, andate forte (oddio, forte è un eufemismo) e siete su una strada tortuosa. Direi che non è proprio bella...
Questo, tanto per fare un esempio.
E veniamo a legare questi discorsi tecnici con le valutazioni da collaudatore.
In base a quello che abbiamo detto fin qui, dando input di sterzo veloci (per veloci, intendo nell'ordine di 1Hz o di più), o negli inserimenti rapidi in curva, o nei rapidi cambi di corsia (lane change), una delle valutazioni che vanno fatte è la bontà dell'appoggio posteriore (la stabilità del posteriore, la sua capacità di esprimere Fy, quindi rigidezza di deriva...). E’ quello che, in gergo, viene chiamato "ricerca di appoggio".
Ebbene, in queste manovre, il posteriore deve appoggiarsi quasi istantaneamente con il movimento del volante, senza però che questo generi un'assenza di sterzatura (cioè procedo in laterale senza girare) oppure anche una doppia sterzatura (cioè, dopo l'appoggio la macchina rimane inerte su una traiettoria per pochi decimi di secondo e poi comincia a sterzare di nuovo e procede su una seconda traiettoria).
E, negli appoggi molto violenti, occorre che la macchina conservi comunque un'ottima stabilità.
:grazie) alfistavero
Passiamo a vedere l’anteriore; e a metterlo poi in relazione col posteriore.
Per l’anteriore, come immaginerete, la formula è questa qui sotto:
Qui, invece dell’angolo di assetto c’è l’angolo di sterzo vol. Attenti bene: quando dico (e basta) è l’angolo di sterzo alle ruote. Quando scrivo vol mi riferisco all’angolo di sterzo al volante (ossia, proprio di quanti gradi giro il volante). Lo so che l’ho già detto: ma è utile ripeterlo.
Quello che mi preme sottolineare, invece, è il fatto che anche in questo caso, come già per la formulazione dell’angolo di assetto , la formula sia la somma di due parti, di due componenti.
C’è una parte COSTANTE che è il mio vol0; e poi c’è una parte che varia con l’accelerazione trasversale Ay.
La parte costante, quella indicata con vol0, prende il nome di sottosterzo cinematico (come nell’altra formula c’era l’assetto cinematico). Cos’è? Semplice: è l’angolo di sterzo che, come minimo, devo dare alle ruote anteriori (alla ruota anteriore, se mi riferisco alla semplificazione del “modello a bicicletta” che utilizziamo) per poter effettuare una sterzatura cinematica, ossia –come sappiamo- SENZA derive.
Attenti bene: se consideriamo il modello a bicicletta, questo angolo di sottosterzo cinematico ha UNO e UN SOLO valore. Che è poi l’angolo che vedete nella figura che vi ripropongo qui sotto e che comporta che il centro di istantanea rotazione sia O’ (quindi, ci stiamo riferendo ai segmenti tratteggiati).
Ma….se sto considerando una macchina vera? Se voglio una sterzatura VERAMENTE cinematica, so bene che devo considerare DUE angoli: quello della ruota interna e quello della ruota esterna. E questi due angoli NON sono uguali, ma diversi. Per farli uguali, DEVO commettere un errore. Ora, se mi riferisco alla ruota esterna (che è quella che “guida” di più in curva…..diciamo così, tanto per farci capire), mettere l’angolo della ruota interna uguale alla esterna significa farle commettere un errore….che si chiama….ACKERMANN….(guarda caso!!!). Ecco perché, questo vol0 prende anche il nome di….ANGOLO DI ACKERMANN!
In sostanza, però, qual è il significato fisico di vol0?
Semplice. Se guardate la formula vol0 è pari al rapporto tra il passo L e il raggio di curvatura (chiaramente, tutto moltiplicato per il rapporto di demoltiplicazione dello sterzo TAU ). Mi dice, in sostanza, che quanto più la macchina è lunga, tanto più dovrò girare le ruote per poter fare la curva di raggio R. pensate, tanto per fare un esempio ****Edit da STAFF: alla prossima account sospeso!, ad un pullman e a una Panda. Per fare la STESSA CURVA, il pullman che è molto ma molto più lungo, dovrà girare (sterzare) le ruote davanti di più della panda. Ma i due conducenti (quello del pullman e quello della Panda) dovranno, in pratica far ruotare il volante dello stesso numero di giri? In teoria NO. In teoria. Basta infatti che il pullman abbia un valore di molto ma molto MINORE perché i due guidatori ruotino il volante dello stesso numero di giri (dello stesso angolo). Chiaro, però, che per un sacco di motivi questo non avvenga mai. Ma in teoria, si può fare.
Andiamo avanti e vediamo il secondo termine. Questo è composto dal prodotto di una parte “costante” (per così dire…), indicata da KUS, e da una parte variabile, l’accelerazione trasversale Ay. In pratica, è lo stesso del gradiente di assetto. Solo che qui, invece del gradiente di assetto KBETA, ho il KUS.
Il KUS prende il nome di GRADIENTE DI SOTTOSTERZO!
Attenti bene: il gradiente di sottosterzo NON è come il gradiente di assetto; cioè, se guardate l’espressione del gradiente di assetto, questo dipende SOLO dal rapporto tra la quota di peso (massa) al posteriore Mr divisa per la rigidezza di deriva del posteriore Cr. Qui, invece, è la DIFFERENZA tra la massa che compete all’anteriore (Mf) divisa per la rigidezza di deriva dell’anteriore (Cf) e la massa che compete al posteriore (Mr) divisa per la rigidezza di deriva del posteriore (Cr). In altre parole, è una formula che mi traduce il fatto che il comportamento dell’auto è conseguenza dell’equilibrio tra avantreno e retrotreno (ma guarda un po’…e chi l’avrebbe detto?).
Peraltro, vi prego di notare che quella parte di KUS che si riferisce al posteriore, ossia Mr/Cr, altro non è se non…..il gradiente di assetto! Quindi, il mio KUS è – consentitemi la licenza ma serve per farvi capire - la differenza tra un qualche “gradiente” che traduce la presenza dell’avantreno e il gradiente di assetto; l’interazione tra questi due, la loro reciproca influenza.
Ora, siccome il KUS è una differenza tra due cose, a seconda che uno dei due addendi (rispettivamente Mf/Cf e Mr/Cr) sia maggiore dell’altro (o, al limite, uguale all’altro), avrò che:
KUS > 0
KUS < 0
KUS = 0
Se:
KUS > 0 si dice che il veicolo è sottosterzante
KUS < 0 il veicolo sarà sovrasterzante
KUS = 0, allora il comportamento del veicolo è neutro.
Rimanendo nel campo LINEARE del funzionamento del pneumatico, quale sarà l’andamento della “curva di sottosterzo” nei tre casi? Ossia, siccome l’espressione della “madre di tutte le formule” (la curva di sottosterzo) lega , cioè l’angolo volante, al valore dell’accelerazione trasversale Ay e di un coefficiente angolare (che abbiamo chiamato KUS e che abbiamo visto da cosa dipende), nei tre casi (>0, <0, =0) come sarà la curva (meglio, la retta)?
- Per KUS>0 avrò una retta che va verso l'alto: all'aumentare di Ay aumenta (o vol).
L'auto e' sottosterzante quindi all'aumentare di Ay devo "chiudere" col volante per mantenere costante R.
- Per KUS<0 la retta va verso il basso, l'auto e' sovrasterzante e all'aumentare di Ay devo "aprire" col volante per mantenere R.
- Per KUS = 0 significa che le forze trasversali generate dall'anteriore e dal posteriore, le Fy, sono uguali. Al crescere di Ay il mio angolo volante non cambia: cioè non ho bisogno di incrementare vol, di girare di più il volante: mi basta tenerlo fermo. In pratica, l'equilibrio tra anteriore e posteriore è tale che, al crescere di Ay, davanti cresce la mia forza Fy e anche Fy posteriore, ma MENO di quanto non cresca davanti (in modo da mantenere sempre l'equilibrio tra l'anteriore e il posteriore) tanto da compensare lo spostamento del centro di istantanea rotazione O (che si sposta perché cambiano le derive). Quindi le derive (anteriore e posteriore) complessive dei due assi sono uguali (rispetto al suddetto centro di istantanea rotazione O).
Graficando le tre condizioni (e supponendo che la macchina sia sempre la stessa, quindi sono uguali il passo, la posizione del baricentro e la curva, cioè R) avremo:
Quindi, fissato il raggio della nostra curva, se (lentissimamente) acceleriamo avviene che:
- KUS>0 vuol dire che più accelero più devo sterzare;
- KUS<0 vuol dire che più accelero meno devo sterzare;
- KUS=0 vuol dire che anche accelerando posso tenere fermo il volante.
Poi vedremo perché i casi KUS = 0 e KUS < 0 (ossia macchina sovrasterzante o, al più, neutra) sono da EVITARSI! La macchina deve sempre essere sottosterzante, anche le F1.
Per spiegare il perché del comportamento sottosterzante (cioè con KUS>0) bisognerebbe introdurre due grandezze che, magari, analizzeremo molto più in là.
Le due grandezze sono il guadagno di accelerazione trasversale, definito come il rapporto tra Ay e vol (quindi: Ay/vol) e il guadagno di velocità di imbardata, definito come il rapporto tra la velocità di imbardata PSIP e vol (quindi: PSIP/vol).
Ora, se guardate l’espressione di queste due formule, vedrete che dipendono dal gradiente di sottosterzo KUS
Eccole:
Dalla madre di tutte le formule abbiamo visto che il comportamento dell’auto, sia esso sottosterzante (KUS>0) o sovrasterzante (KUS<0), dipende moltissimo dalla velocità di percorrenza della curva (la mia V), perché l’accelerazione Ay è funzione della mia velocità V al quadrato. Il caso di comportamento neutro (KUS=0) è invece differente: l’angolo di sterzo è sempre COSTANTE e vale L/R (Ackermann)!
Ora, il livello di sottosterzo viene anche identificato da una velocità detta velocità caratteristica, che è la velocità necessaria per ottenere, all’incirca, una sterzata (un angolo di sterzo) pari al DOPPIO dell’angolo di Ackermann (siccome è
vol = (L/R + KUS (V^2/R))*, e vol deve valere 2L/R, allora sarà V^2 = L/K con K>0).
La velocità caratteristica di un veicolo sottosterzante è quella particolare velocità alla quale l’angolo di sterzo necessario per seguire una data traiettoria è il doppio dell’angolo di Ackermann (ossia dell’angolo di sterzo cinematico).
Nel caso di veicolo sovrasterzante, invece, l’angolo di sterzo deve diminuire. E scende, pure lui, col quadrato della velocità. E arriva a zero (0), cioè interseca l’asse delle ascisse, con una certa velocità, detta “velocità CRITICA”. Ora, attenti bene a non confondere questa velocità critica con la velocità critiche che abbiamo definito tanto tempo fa quando abbiamo parlato del pneumatico. Sono due velocità completamente differenti!
In questo caso, la velocità critica di un veicolo sovrasterzante è V^2 = L/(-K). Ho scritto (-K) perché K è minore di 0.
Quindi, la velocità critica è quella velocità alla quale il guadagno di velocità di imbardata diventa infinito. Detto in altre parole: basta una minima perturbazione perché la macchina si ribalti!
Ecco perché si fanno veicoli sottosterzanti e non sovrasterzanti (oltre al fatto che la correzione di un sovrasterzo è una manovra totalmente innaturale per il 99% dei “piloti”): perché alla “velocità critica” basta un niente perché l’auto diventi, di colpo, ingestibile.
Tanto per fare un discorso più semplice: pensiamo di avere un veicolo in marcia rettilinea a cui applichiamo, nel baricentro CG, una forza laterale. Se il veicolo è neutro la traiettoria seguita sarà sempre rettilinea (anche se con una certa “deriva” rispetto alla traiettoria iniziale); mentre se il veicolo è sottosterzante o sovrasterzante, avrò due comportamenti distinti. Se sottosterzante, tenderà a deviare e ad aumentare la deriva del baricentro (cioè l’angolo di assetto β); se sovrasterzante, invece, diminuirà l’angolo di deriva del baricentro, ossia l’angolo di assetto β, fino ad annullarsi e poi ad invertirsi (diventare negativo) e, da lì continuare a crescere. Quindi, la condizione di sovrasterzo è una condizione di instabilità - come dire - “endemica”, naturale.
Chiaro poi che la condizione di neutralità è sicuramente da evitare; sia perché non consente di avere un buon “feeling” con il limite, sia perché è molto facile passare, dalla neutralità, alla condizione di sovrasterzo (che, come detto, va evitata assolutamente).
Tanto per farvi qualche esempio:
- Nel primo grafico, abbiamo l'andamento del guadagno di imbardata in un veicolo sottosterzante:
- Nel secondo grafico è riportato l'andamento del guadagno di imbardata (in funzione della velocità) in un veicolo sovrasterzante:
Come vedete, alla "velocità critica" il veicolo sovrasterzante "parte" senza alcuna possibilità di recupero (la velocità tende ad infinito; ha una discontinuità); invece il veicolo sottosterzante ha solo un "massimo" (assoluto).
Qualcuno più attento mi chiederà quale relazione ci sia tra la velocità di imbardata (PSIp) e l'accelerazione trasversale (Ay).
Ecco la relazione che intercorre tra PSIp, Ay e p (velocità di assetto):
Ay = V * PSIp + V * p = V (PSIp + p)
Nel caso che consideriamo noi, ossia di steering pad a raggio costante, p (cioè la velocità di assetto) è nulla perché abbiamo supposto che stiamo percorrendo la curva praticamente a velocità costante. Quindi, è costante e la sua derivata = 0. La formula diventa:
Ay = V * PSIp
Consideriamo il caso di veicolo sottosterzante, quindi con KUS>0.
Posto due grafici. Il primo è il grafico che lega l’angolo volante vol con l’accelerazione Ay.
Il secondo lega con Ay.
Il primo è il grafico della “curva di sottosterzo”; il secondo è il grafico della “curva di assetto”.
Consideriamo, per ora, solo la zona in cui i pneumatici lavorano nella loro zona di funzionamento lineare. Considerate 1 sola retta su ciascun grafico, corrispondente ad un ben preciso raggio di curvatura R.
Sulla curva di sottosterzo, vedete che al crescere dell’accelerazione Ay (quindi, se aumento la velocità di percorrenza della curva a parità di raggio di curvatura R) aumenta l’angolo VOL di cui devo ruotare il volante. Parimenti, nel grafico inferiore (sulla curva di assetto), al crescere di Ay il posteriore deve “compensare” l’aumento di forza centrifuga con una crescita dell’angolo di assetto .
Ora, finché il posteriore mi offrirà “appoggio”, ossia sarà in grado di generare forza trasversale per compensare l’aumento di forza centrifuga data dall’aumento di accelerazione trasversale (e, per farlo la macchina dovrà aumentare il proprio assetto , perché SOLO COSI’ potrà fare aumentare l’angolo di deriva del posteriore), la mia curva di assetto avrà l’andamento che vedete in figura; e, parimenti, finché l’anteriore sarà in grado di generare forza trasversale per compensare l’aumento di forza centrifuga della parte anteriore data dall’aumento di accelerazione trasversale (e, per farlo dovrò girare il volante, perché SOLO COSI’ posso aumentare l’angolo di deriva dell’anteriore), la curva di sottosterzo avrà l’andamento che vedete nella figura.
Dalla formula che esplicita il KUS, ossia dalla relazione (Mf/Cf – Mr/Cr), mi sembra chiaro che, se “irrobustisco” il posteriore, cioè lo rendo più “potente”, più in grado di “assorbire” forza trasversale, più in grado di generare “spinta” trasversale per compensare la quota di forza centrifuga che gli compete, cambio ENTRAMBE le curve.
Infatti, cambio la curva di assetto perché cambio il KBETA, il gradiente di assetto (che è Mr/Cr), che diventerà dunque MENO INCLINATA.
Ma cambio pure KUS, il gradiente di sottosterzo, ossia (Mf/Cf – Mr/Cr), perché la differenza tra i due termini (quello che esprime l’anteriore e quello che esprime il posteriore che, guarda caso, coincide con il KBETA) mi farà cambiare la pendenza della curva di sottosterzo, rendendola……PIU’ INCLINATA.
Viceversa, se modifico solamente l’anteriore, per esempio “irrobustendolo”; oppure rendendolo meno in grado di assorbire forza trasversale, la modifica influirà solo sul KUS, perché tocco il rapporto Mf/Cf; ma Mr/Cr rimane uguale. Ossia, rimarrà uguale il KBETA! A questo punto, potrei trovarmi nella condizione di avere un avantreno molto performante, cioè in grado di assorbire grandi spinte laterali (ossia, in grado di generare grandi forze trasversali con poco angolo volante, quindi con una pendenza della retta KUS poco inclinata); mentre, col retrotreno, di non essere altrettanto “performante”, quindi con una pendenza della retta KBETA molto inclinata. Ora, se questo set up può essere tollerato per le accelerazioni Ay medio- basse, cosa potrebbe succedere quando vado su con l’Ay, ossia vado più forte, in virtù del fatto che, adesso, sappiamo bene come “satura” la curva di assetto?
Insomma, vi ricordate quando, molto prima di queste discussioni, vi dicevo che è il retrotreno che “guida” la macchina; che, per fare un buon lavoro, bisogna partire sempre dalla messa a punto del posteriore; che, se si deve cambiare qualcosa, occorre tenere bene presente il comportamento del retrotreno? Ecco.
Adesso, qui in questi grafici, ho aggiunto anche le curve che descrivono i casi in cui si vari R (cioè il raggio di curvatura) e in cui si vari la velocità V (tracciando i segmenti tratteggiati “iso-velocità”). Anche per il caso della curva di sottosterzo, vale quello che abbiamo detto qualche tempo fa quando parlavamo di . Ossia, che al variare di R varierà solo il mio “sottosterzo geometrico”, o Ackermann (il rapporto l/R, cioè passo diviso raggio di curvatura); mentre, come potete vedere dai segmenti tratteggiati, se vado a bassa velocità, per impegnare la macchina in alte accelerazioni trasversali, dovrò girare molto il volante, mentre all’aumentare della velocità mi sarà richiesto sempre meno angolo volante per “andare su” con l’accelerazione trasversale (= impegnare tanto la macchina).
Domanda: come faccio se voglio "irrobustire" l'anteriore? e il posteriore?
Vediamolo con un esempio pratico.
Ho preso la foto di una 166 perché è l’unica ripresa laterale di una vettura che sono riuscito a trovare. Se vi piace di più, fate conto che al posto della 166 ci sia la 147, ma il discorso non cambia.
Il KUS è la differenza tra Mf/Cf e Mr/Cr, ossia la differenza del rapporto tra massa e rigidezza di deriva anteriore MENO il rapporto tra massa e rigidezza di deriva posteriore.
Ma vi ricordate cosa abbiamo detto del rapporto M/C quando abbiamo parlato del KBETA?
Abbiamo detto che, a meno dell’accelerazione di gravità, questo rapporto non è altro se non il coefficiente angolare (rispetto all’asse delle ordinate) della curva che lega la rigidezza in deriva in funzione della forza normale (che, nel caso di macchina che giace su un piano, coincide con la forza peso che compete a quell’asse).
Bene, qui è lo stesso.
Consideriamo, dunque, una macchina con il baricentro CG spostato in avanti. Per esempio, una vettura TA come la 166. o come la 147. o quello che volete voi. Una macchina che abbia 4 ruote UGUALI.
Se facciamo il ragionamento suesposto per la macchina, e consideriamo che l’asse anteriore è quello più pesante, vediamo che “naturalmente” l’asse anteriore ha un rapporto M/C (quindi, il mio Mf/Cf) MAGGIORE rispetto al rapporto M/C del posteriore (cioè l’ Mr/Cr). Lo vedete che l’angolo “verde” è maggiore dell’angolo “rosso”? quindi, la mia macchina sarà, per definizione, UNA VETTURA SOTTOSTERZANTE, perché il KUS non potrà che essere POSITIVO. Non c’è nemmeno bisogno di provarla su strada, per capirlo! Già da ferma, voi sapete dire che è una macchina sottosterzante.
Quindi, come potrei fare per renderla più o meno sottosterzante; o, al limite, sovrasterzante?
Semplicissimo:
1- modificando la rigidezza di deriva dei pneumatici, e mantenendo la medesima distribuzione dei pesi. basta solo che cambi le ruote dietro, e le metta più LARGHE e avrò una vettura più sottosterzante. Se, invece, le mettessi davanti, ridurrei il KUS e, al limite, arriverei ad avere una macchina con KUS<0!
2- Cambiando le pressioni dei pneumatici (di parecchio). Come sapete, infatti, la pressione del pneumatico influenza molto la rigidezza di deriva C. e la curva che descrive questo andamento ha -guarda caso- un andamento molto simile a quello della curva Fy-α (quindi, con una crescita iniziale; una zona di massimo e poi una più o meno marcata diminuzione. La zona di massimo, diciamo che, il più delle volte, è nell’intorno dei 2 bar….circa). quindi, che so, potrei abbassare parecchio la pressione delle ruote dietro e avrei una macchina sovrasterzante (KUS negativo): oppure, potrei gonfiare quelle davanti a 3 bar e avere + sottosterzo….e via così
3- Potrei cambiare la distribuzione dei pesi. Metto nel baule 4 sacchi di cemento e la macchina abbasserà sicuramente il KUS.
4- Cambio le ripartizioni di rigidezza equivalenti. Che so, metto una barra da 50 mm dietro e vedrai che bei sovrasterzi!!!!
Insomma, ci si può sbizzarrire!
Alla luce di quanto detto fino a qui:
1- capirete benissimo che frasi da veri “teNNici” come quelle che mi capita di leggere su molte riviste specializzate del tipo: “…la BMW ha così ottenuto una distribuzione di pesi praticamente ottimale: 50% sull’avantreno e 50% sul retrotreno…” lasciano il tempo che trovano. CHE SIGNIFICA UNA DISTRIBUZIONE DEI PESI 50 E 50? Se non ho una gommatura differenziata e non lavoro sulle rigidezze (barre, etc), significa solo che tendo al KUS=0,
CHE EQUIVALE A UNA SONORA FESSERIA (come abbiamo visto);
2- farete meno fatica a capire perché le Porsche 911, soprattutto quelle più vecchie, non erano molto apprezzate dai neopatentati. Tenete conto che le prime 911 avevano una gommatura praticamente simile davanti e dietro. Solo a metà degli anni ’70 la Porsche ha incominciato a lavorare seriamente sulla dinamica laterale della 911;
3- comprenderete appieno il significato di quella frase riguardo la Lamborghini Miura e che viene fatta risalire all’allora capo collaudatore delle Lamborghini (Bob Wallace) che diceva che la Miura, nelle curve ad alta velocità, tendeva a “sovrasterzare improvvisamente”.. e che solo in seguito, con l’introduzione di nuovi pneumatici (Pirelli, mi pare; e mi pare di misura differenziata), erano riusciti a porvi - in parte – rimedio;
5- avete capito perché la Smart ha la gommatura differenziata tra l’anteriore e il posteriore. NON è perché ha la TP. E nemmeno perché ha molti cavalli (ma dove?). Ma perché è corta, e ha il CG spostato al posteriore!
6- supponete di essere proprietari BMW X6. In allestimento standard, la X6 (come molte altre BMW) esce con gommatura identica davanti e dietro (e su questa gommatura base viene fatto tutto lo sviluppo da parte della casa). Voi, però, vi sentite molto più fighi e scegliete la versione sportiva, con tanto di “assetto” e gommatura differenziata. Significa: maggiori rigidezze (e barre più grandi…davanti) e gomme più larghe dietro (quindi, con maggiore rigidezza di deriva al posteriore). Ma la distribuzione dei pesi è sempre quella.
Domanda: sarà più sottosterzante la X6 “normale” o la X6 “con l’assetto”?
Adesso, tanto per “saggiare” quanto ci capisca il “cliente tipo” di una BMW del genere, se conoscete qualcuno che ha una X6 con l’assetto provate a chiedergli se trova la sua X6 “assettata” più o meno sottosterzante rispetto a una X6 normale (qualora l’avesse mai provata).
Prima di andare avanti, vi invito a dare un'occhiata ai due grafici qui sotto
Sono rappresentate la curve di sottosterzo (non ancora in forma definitiva) e la curva di assetto (questa sì, definitiva: considerate la curva continua rossa che piega poi verso il basso).
Per prima cosa, vi invito a guardare, nei due grafici, i valori di Ay in cui sono tratteggiate le curve. Vedrete che, nel caso della curva di sottosterzo, arriviamo al massimo a 1 g; nel caso di , invece, siamo al doppio. Chiaramente, la cosa non è proprio realistica, ma insomma....quasi. Serve più che altro per dirvi che, in una macchina ben fatta, i limiti di aderenza del posteriore devono essere ben più alti dell'anteriore, in modo che si possa avere un comportamento "sano" e che la vettura "saturi" prima davanti. altrimenti, sono guai.
In più, vi inviterei a guardare la curva BETA. ho tracciato anche un andamento NON LINEARE (tratto arancione). chiaramente, anche in questo caso, le cose nella realtà non sono proprio così. ma fa niente. l'importante è capirsi.
Bene: supponete che la curva di assetto della macchina che stiamo considerando sia questa (cioè tratto arancione + tratto rosso e curva verso il basso). supponiamo che sia vera. Significa, come detto, che la macchina, al variare di Ay, continua a recuperare (e cedere) assetto, indice di scarsa linearità sull'assetto.
Quindi il comportamento lineare (la risposta lineare del pneumatico) rimane tale SOLO fino a valori di Ay di circa 0,5 g
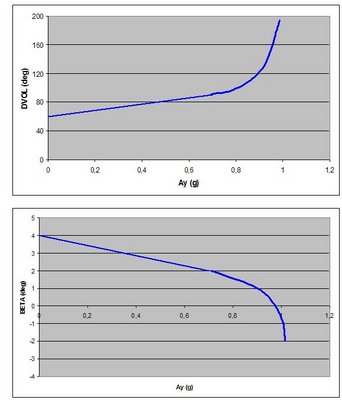
Adesso, supponendo che il posteriore sia sufficientemente "buono" (e lo diamo per scontato), vediamo come potrebbe evolvere la mia curva di sottosterzo al crescere dell'accelerazione trasversale.
La saturazione della curva avverrà (ed è così per le auto stradali) intorno a 1g e poco prima della saturazione della curva di assetto BETA.
Il caso reale è questo:
Come vedete, entrambe le curve saturano quasi nello stesso momento, ma l'anteriore satura prima.
E’ chiaro che tanto più una macchina sarà considerata progressiva quanto più si discosterà dalla linearità già da medie accelerazioni (0,4 g circa).
tanto meno progressiva, invece, verrà considerata quanto più il distacco dalla linearità sarà portato in avanti, vicino alla saturazione.
L’esempio dell’Audi TT
Veniamo al caso Audi TT.
Quando uscì, la 156 fece un certo scompiglio presso le case concorrenti; in modo particolare per quanto riguardava l'handling. la 156 (e la 147) hanno rappresentato una Milestone per la concorrenza. I guadagni sterzo (adesso sapete cosa sono) e le caratteristiche handling della 156 hanno rappresentato un vero e proprio elemento di "rottura" con tutto quello che c'era prima. Figuratevi che, tanto per dirne una, la BMW, ancora adesso, porta in Svezia (sulla pista di prova dove svolge le proprie sessioni invernali) due 147 (prima serie) come riferimento per le proprie macchine di adesso.
La 156 ha fatto scuola (e la farebbe ancora). anche all'Audi sono rimasti piuttosto sorpresi.
L'Audi TT, è uscita qualche mese dopo (6 mesi dopo, mi pare)
Chiaro che, all'Audi, si saranno detti: facciamo una macchina sportiva e rischiamo di fare una macchina con un comportamento meno sportivo di quello di una berlina (della concorrenza)?
Insomma, per farla breve: dopo qualche tempo, furono segnalati dei casi di vetture che, all'improvviso, uscivano di strada, volavano fuori strada. soprattutto in Germania. roba da far tremare anche i più affidabili tecnici tedeschi.
Cos'era successo?
Dovete sapere che la TT aveva un set up di sospensioni e gomme che comportava delle curve di sottosterzo e di assetto come quelle che vi ho disegnato sopra. In pratica, del tutto poco progressive. Ossia, la macchina dimostrava un'ottima resistenza al sottosterzo, un buon gradiente di sottosterzo (e di assetto); nella zona lineare a medio bassa accelerazione (quella che normalmente viene indicata come sottosterzo "geometrico") era molto buona. e si manteneva buona anche alle accelerazioni medio-alte. diciamo fino a circa 0,75/0,8 g.
Solo che poi, la saturazione avveniva in maniera molto repentina. era un comportamento assolutamente sportivo. fin troppo sportivo. quasi da macchina da corsa. Insomma: teneva, teneva, teneva; fino quasi al limite. e poi, perdeva aderenza d'improvviso.
Seconda cosa: quella forma lì, quella della TT, come quella del maggiolino (e di tutte le macchine in genere), è una forma assolutamente "portante" dal punto di vista aerodinamico. e la portanza è direttamente proporzionale al quadrato della velocità. Perciò, ad alta velocità (come quelle che si tengono in Germania: ecco perché gli incidenti avvenivano soprattutto in Germania), il carico verticale al posteriore si riduceva TANTISSIMO.
ora, voi sapete benissimo che la forza trasversale che contrasta la forza centrifuga può generarsi solo se ho forza verticale (peso) che "schiaccia le gomme a terra". Se non si genera forza verticale, non si può neanche generare forza trasversale. mi sembra chiaro. e se la forza verticale è bassa, cosa succede al posteriore? succede come nel caso che abbiamo visto qualche tempo fa: poca capacità del posteriore di assorbire forze trasversali ==> quasi una tendenza al sovrasterzo.
e abbiamo anche visto che un comportamento sovrasterzante NON è un comportamento STABILE per la macchina. Inoltre, la scarsa forza verticale comporta altrettanto scarsa generazione di forza trasversale.
Risultato: ad alta velocità, bastava una piccola perturbazione per generare instabilità. ed era proprio quello che succedeva. col risultato di far ribaltare la macchina.
quindi, 2 problemi per 1 casino.
Capiti i problemi, ecco le soluzioni:
1- cambiare la definizione aerodinamica della macchina: per ridurre la portanza hanno messo lo spoiler;
2- cambiare la m.a.p. sospensioni (tra l'altro in modo rapido): spostare l'equilibrio verso il sottosterzo (in modo molto evidente): cambiare la ripartizione di barra spostandola verso un sottosterzo accentuato. e modificare le caratteristiche dei pneumatici (rigidezze di deriva, rendendole più progressive).
E le cose sono migliorate.
Gradiente di sottosterzo e assetto, indice di sottosterzo e assetto.
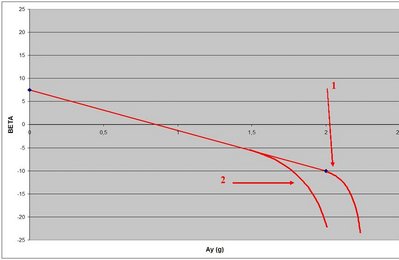
Riprendiamo il disegno qui sotto, già postato.
Come vedete, ci sono 2 andamenti differenti nel modo con cui satura la curva di assetto, uno dei due è più progressivo dell'altro.
Fatta salva l'accelerazione massima raggiungibile (la curva 2 mostra un limite chiaramente inferiore della curva 1), cosa potrei fare per tradurre NUMERICAMENTE la maggiore progressività della curva 2 rispetto alla 1?
Per esempio, supponete che entrambe le curve raggiungano la medesima Ay massima. Come faccio per dare un numero che traduca la maggiore progressività?
Un modo sarebbe misurare l'area sottesa dalla curva (dal punto in cui inizio a discostarmi dalla linearità fino ad Ay max) dividendolo per la lunghezza stessa (magari, al quadrato...così dimensionalmente avrei un numero puro).
Oppure, proviamo a considerare la curva di sottosterzo. abbiamo detto che la dividiamo in due parti: la prima, lineare, fino a circa 0,4g; la seconda, NON lineare, da 0,4g fino ad Aymax.
La parte lineare avrà un'equazione del tipo Y = mx + n dove Y è il vol, m è il KUS, x l'Ay e n il vol0 (cioè l'Ackermann o angolo di sottosterzo cinematico).
La parte NON lineare posso approssimarla anche con una curva quadratica del tipo
Y = M x2 + N
dove:
Y vale sempre vol
x = Ay
M e N sono due coefficienti di interpolazione. a me però interessa M che potrebbe diventare il mio coefficiente quadratico di sottosterzo.
Stesso identico ragionamento per la curva di assetto.
Dobbiamo definire degli "indici" che ci dicono qualcosa riguardo la parte NON lineare delle curve di sottosterzo e di assetto:
- per la curva di sottosterzo, potremmo definire un indice che è uguale al rapporto tra il coefficiente quadratico dell'equazione che descrive la curva nella zona non lineare e il coefficiente lineare della zona lineare (ossia fino a 0,4g). in pratica, sarebbe IUS = M/m = M/KUS;
- per la curva di assetto, idem. ossia: un indice che è uguale al rapporto tra il coefficiente quadratico dell'equazione che descrive la curva nella zona non lineare e il coefficiente lineare della zona lineare (ossia fino a 0,4g). in pratica, sarebbe IBETA = B / KBETA. dove B sarebbe il coefficiente quadratico dell'equazione (del tipo BETA = B (Ay)^2 + Bo) che descrive la parte di curva di assetto non lineare.
Vediamo il significato fisico di questi coefficienti.
Cominciamo dal gradiente di sottosterzo KUS.
il KUS, in pratica, è una diretta espressione del margine di stabilità di una macchina. Un KUS basso significa che A BASSE ACCELERAZIONI (cioè fino a 0,4g) ho bisogno di modesti valori di angolo volante per mantenere la traiettoria.
Attenzione bene: tutti questi indici sono riferiti a curve (la curva di sottosterzo e la curva di assetto) che vengono misurate in condizioni stazionarie, quindi nel comportamento a regime della macchina e prescindono da ogni considerazione circa i transitori di risposta ai comandi impartiti con lo sterzo alla macchina... e anche alle variazioni di coppia motrice applicate.
Inoltre, il gradiente di sottosterzo KUS assume tanto più significato quanto più "scarse" sono le capacità di chi è alla guida della macchina; quanto più basse sono le capacità di sfruttare la macchina da parte del conducente, di sfruttare i limiti di manovra della vettura.
Un guidatore professionista, ad esempio un collaudatore, tende invece a riferire i propri giudizi soprattutto nelle manovre al limite e quindi, per questa categoria di guidatori, il KUS assume un significato abbastanza "sfumato". Insomma, diciamo che è più importante, per questo genere di guidatori professionisti, l'indice di sottosterzo IUS.
Comunque, un valore basso di KUS sottintende una esaltazione della manovrabilità della macchina (sintomo di buone qualità handling); però questo basso KUS deve andare di pari passo con bassi valori di KBETA e di IUS per evitare che la risposta dinamica della vettura sia estremamente scompensata (provate a pensare a una macchina che ha un basso KUS, cioè poco sottosterzo sul lineare, e un alto IUS o IBETA....insomma, pensate a qualcosa come all'Audi TT quando si ribaltava).
Diciamo che è un po' difficile generalizzare, ma bassi valori di KUS (ma bassi, eh) comportano giudizio sensitivi del tipo: difficoltà di manovra, tendenza della macchina a sovrasterzare, instabilità, etc. (chiaramente, tutto ciò in linea di massima, eh....e in funzione anche del KBETA...)... alla fine: guida impegnativa.
Elevati valori di KUS, invece, comportano giudizi del tipo: molto sottosterzo, manovrabilità limitata e anche risposta lenta della vettura...
Quindi, il KUS non deve essere mai eccessivo (né in un senso, né nell'altro)...in linea di massima.
Dopo il KUS, il gradiente di sottosterzo, c'è l'indice di sottosterzo (o IUS).
Come già detto, l'IUS sarebbe il rapporto tra il coefficiente quadratico (della curva di secondo ordine che descrive il tratto di curva di sottosterzo a partire da 0,4g) e il KUS; e, come già detto (pure questo), è un parametro, un coefficiente, che assume tanto maggiore importanza quanto maggiore è la capacità (l'abilità) del guidatore.
L' IUS è l'espressione della legge con cui l'attività di sterzo richiesta al guidatore si incrementa per il raggiungimento dei limiti di manovra della macchina.
Un IUS elevato comporta la tendenza della vettura ad essere assai meno sensibile agli input sterzo alle alte accelerazioni rispetto ai livelli inferiori. Non so se riesco a spiegarmi.
Avere un IUS alto significa che, man mano che Ay cresce, la mia macchina è sempre meno sensibile all'angolo sterzo: in pratica, devo dare sempre più angolo sterzo se voglio che faccia quello che chiedo (cioè stare sulla traiettoria).
Ora, questo decadimento della sensibilità della macchina a rispondere ai comandi sterzo con l'aumentare della Ay, riassunta nell'IUS, è strettamente legata alla percezione, da parte del guidatore professionista (professionista, eh....), come grado di sottosterzo della macchina.
per cui, un elevato valore di IUS comporterà giudizi del tipo: elevato sottosterzo, scarsa manovrabilità della macchina, etc.
Passiamo adesso alla curva di assetto e vediamo il “significato” del gradiente di assetto KBETA.
Come già sapete bene, o dovreste sapere bene, KBETA è il coefficiente angolare del tratto rettilineo della curva di assetto, quel tratto rettilineo compreso tra 0 e 0,4g.
KBETA indica la variazione dell’angolo di assetto (che, in pratica, per dargli un significato che possiate capire è l’angolo di deriva del baricentro CG della macchina) all’aumentare dell’accelerazione laterale Ay.
Il gradiente di assetto KBETA (che deriva dalla madre di tutte le formule) è il miglior indice della capacità del posteriore di “assorbire” la variazioni di carichi trasversali senza che queste variazioni comportino “scompensi” nel comportamento della macchina; scompensi (più o meno) avvertibili per esempio in presenza di transitori rapidi in manovra, ma anche in caso di perturbazioni esterne. Per esempio, provate a pensare a due macchine che stanno viaggiando su una strada con tanto vento laterale. Una delle due macchine, magari, in presenza delle raffiche di vento restituisce una sensazione di maggiore”instabilità” dell’altra. Ecco, questa macchina probabilmente ha una gradiente di assetto più elevato (in senso assoluto, perché poi c’è il meno davanti).
Perciò, valori di gradiente di assetto elevati (sempre in valore assoluto, eh…mi raccomando!) comporteranno giudizi del tipo: sovrasterzo nelle manovre, difficoltà di controllo, instabilità direzionale. Ma anche quella famosa “risposta in due tempi” che spesso contraddistingue la maggior parte delle auto in circolazione (anche se questo giudizio è legato pure ad altri problemi che affliggono il posteriore).
L’indice di assetto IBETA, invece, è definito esattamente nello stesso modo dell’indice di sottosterzo IUS, quindi come un rapporto.
Nel caso dell’ IUS, questo era il rapporto tra il coefficiente quadratico della curva quadratica (di secondo ordine) che descrive l’andamento della curva di sottosterzo nel tratto di Ay compreso tra 0,4g e Aymax e il coefficiente lineare della curva (della retta) nel tratto di Ay compreso tra 0 e 0,4g (che poi è il mio KUS).
Qui, nel caso dell’IBETA, è il rapporto tra il coefficiente quadratico della curva quadratica (di secondo ordine) che descrive l’andamento della curva di assetto nel tratto di Ay compreso tra 0,4g e Aymax e il coefficiente lineare della curva (della retta) di assetto nel tratto di Ay compreso tra 0 e 0,4g (che poi è il mio KBETA).
L’IBETA è l’espressione del modo con cui il posteriore assorbe i carichi trasversali quando la macchina si avvicina al limite di aderenza.
Quindi, un indice di assetto elevato (sempre in valore assoluto, eh!) comporta una elevata discontinuità nella deriva del posteriore quando si passa dai medi agli alti carichi trasversali: in pratica, è un indice che mi rappresenta il grado di prevedibilità del comportamento della vettura. Una macchina con un IBETA elevato è una macchina con un comportamento poco prevedibile (pensate all’ AUDI TT prima serie, quella che si ribaltava…ecco: quella TT aveva un IBETA molto elevato).
Tutto ciò, naturalmente, in linea di massima. Perché poi, oltre all’IBETA, entrano in gioco altri fattori.
Un IBETA elevato, infatti, può determinare un comportamento dinamico imprevedibile e pericoloso nei transitori dinamici solo in funzione di altri parametri della vettura, come per esempio, il momento polare d’inerzia della macchina, le variazioni di assetto dovute ai trasferimenti di carico tra anteriore e posteriore (se ho una macchina con tanto trasferimento di carico tra anteriore e posteriore, allora le cose peggiorano…) o le modalità con cui uso l’acceleratore (o meglio, la coppia motrice applicata/tolta alle ruote motrici, quindi i transitori di coppia), etc.
Comunque sia, valori elevati di IBETA (indice di assetto) comporteranno giudizi del tipo: difficoltà di controllo della macchina, macchina sovrasterzante al limite, tendenza la sovrasterzo al limite, macchina poco gestibile e guidabile al limite, etc.
Angolo e Gradiente di rollio
Finora abbiamo visto angoli di deriva, rigidezze in deriva, angoli di assetto e "rigidezze" di assetto (il gradiente KBETA, tanto per chiamarlo in un altro modo). iInsomma, è come se guardassimo la macchina dall'alto.
Però, la macchina si muove anche attorno ad altri assi. in particolare attorno all'asse di rollio che è quello longitudinale.
Anche per il rollio si può descrivere il moto a rollio riportando su un grafico la rotazione (attorno al CR, centro di rollio) della cassa, quindi l'angolo di rollio, in funzione dell'accelerazione trasversale Ay nella manovra di steering pad (quindi in condizioni stazionarie). insomma, oltre all'angolo volante vol e all'assetto , considero anche il rollio THETA . e lo riporto in un grafico in funzione di Ay.
Detto questo, mi sembra chiaro che il grafico della curva che lega l'angolo di rollio THETA all'accelerazione trasversale Ay non potrà che essere una retta (e basta: nessun allontanamento dalla condizione rettilinea perché il legame tra forza, cioè Ay, cioè momento di rollio, e deformazione, cioè rotazione della cassa, è lineare), semplicemente perché mi trovo in condizioni stazionarie (quindi, a pari forza trasversale ci sarà pari momento di rollio cui corrisponderà pari rotazione della cassa...).
Il coefficiente angolare di questa retta altro non sarà se non la rigidezza a rollio della mia macchina. e si chiamerà...gradiente di rollio, lo si indica con KTHETA
Questo gradiente consente di valutare l'entità del coricamento assunto dalla vettura in conseguenza del carico inerziale trasversale (cioè la massa applicata al CG moltiplicata per l'accelerazione trasversale Ay) durante le manovre; nello specifico, lo steering pad a raggio costante.
Ora, sulla percezione soggettiva, ossia sulla sensazione di "coricamento" della vettura, il gradiente di rollio ha grande importanza, senza dubbio. Ma, come vi ho detto parecchio (ma parecchio) tempo fa, a determinare questa sensazione concorre pure la velocità di rollio (quindi, tutto il discorso sugli ammortizzatori): velocità di rollio elevate significano moti di cassa pronti, anche in presenza di "forzanti" esterne casuali, con conseguente sensazione di un comportamento dell'auto di instabilità trasversale della vettura. Pensate, per esempio, al caso di una macchina molto morbida, che rolla molto: la sensazione è che non sia molto stabile, almeno trasversalmente (pensate a una vecchia Citroen, per esempio), anche se poi, magari, non è proprio così...
In ogni caso, elevati valori di gradiente di rollio comportano, quanto a sensazioni, giudizio del tipo: coricamento eccessivo, risposta dinamica della macchina ritardata (adesso, vediamo perché), riallineamento lento (ovvio!!!), manovrabilità scarsa.
Prima di andare avanti, vediamo la successione temporale degli eventi che accadono da quando giro il volante. ossia, cosa succede quando giro il volante? prima giro il volante, poi cosa succede?
Succede questo:
1- giro il volante. nasce un angolo di deriva che genera una forza trasversale anteriore che fa ruotare la macchina;
2- nasce un angolo di assetto e la macchina imbarca;
3- l'imbardata genera la deriva del posteriore;
4- si genera la forza trasversale Fy che agisce su CG;
5- la Fy genera il rollio;
6- la cassa termina di rollare e il transitorio si esaurisce. la somma delle forze trasversali generate da anteriore e posteriore equilibrano la Fy su CG.
Questo in condizioni ideali.
Mi sembra chiaro che quanto minore è il tempo che passa dal momento in cui giro il volante a quando la macchina "appoggia" (e quindi, ne percepisco l'appoggio), tanto migliore sarà la macchina.
Provate a pensare a una Citroen 2CV, macchina con tanto rollio: quando girate il volante vi sembra di andare in barca, e valutate la sensazione quando, per esempio, andate forte (oddio, forte è un eufemismo) e siete su una strada tortuosa. Direi che non è proprio bella...
Questo, tanto per fare un esempio.
E veniamo a legare questi discorsi tecnici con le valutazioni da collaudatore.
In base a quello che abbiamo detto fin qui, dando input di sterzo veloci (per veloci, intendo nell'ordine di 1Hz o di più), o negli inserimenti rapidi in curva, o nei rapidi cambi di corsia (lane change), una delle valutazioni che vanno fatte è la bontà dell'appoggio posteriore (la stabilità del posteriore, la sua capacità di esprimere Fy, quindi rigidezza di deriva...). E’ quello che, in gergo, viene chiamato "ricerca di appoggio".
Ebbene, in queste manovre, il posteriore deve appoggiarsi quasi istantaneamente con il movimento del volante, senza però che questo generi un'assenza di sterzatura (cioè procedo in laterale senza girare) oppure anche una doppia sterzatura (cioè, dopo l'appoggio la macchina rimane inerte su una traiettoria per pochi decimi di secondo e poi comincia a sterzare di nuovo e procede su una seconda traiettoria).
E, negli appoggi molto violenti, occorre che la macchina conservi comunque un'ottima stabilità.
:grazie) alfistavero