Il Torsen è un differenziale autobloccante sensibile alle differenze di coppia (Tor = torque ; sen = sensing) che utilizza una complessa geometria degli ingranaggi al fine di:
• differenziare la velocità delle ruote o dei due assi in curva, a seconda che sia montato rispettivamente su un asse oppure in posizione centrale;
• evitare lo slittamento di una ruota o entrambe (in caso di TorSen centrale) in condizioni di scarsa aderenza, forzando la coppia ad andare verso la ruota o l’asse a maggiore aderenza.
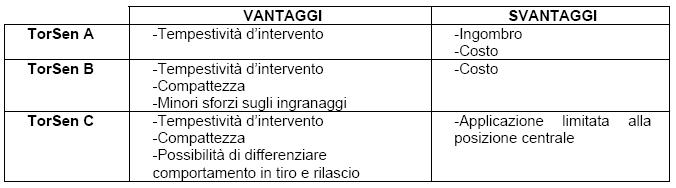
Esistono tre diverse tipologie di TorSen, classificati come A, B o C. Differiscono l’uno dall’altro per la diversa geometria degli ingranaggi, ma il principio di funzionamento per ottenere il bloccaggio è lo stesso nelle tre configurazioni. In sintesi nella tabella sottostante sono evidenziate le caratteristiche peculiari:
Nelle nuove versioni 147 e GT Q2, oltre all’incremento del differenziale epicicloidale TorSen B sono state apportate delle modifiche alle sospensioni per una maggiore rigidezza, e al software della centralina ABS (cambiate le soglie d’intervento del sistema VDC).
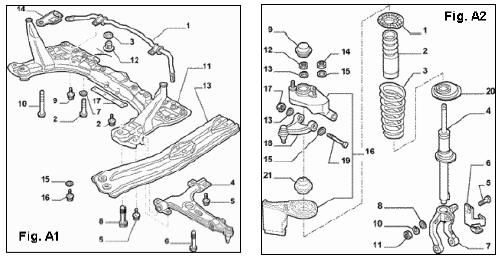
Varianti componenti della sospensione Anteriore
Nelle sottostanti figure sono illustrati i componenti specifici per la versione Q2, essi sono:
• Ammortizzatore ( 4 fig.A2 )
• Tamponi ( 2 fig.A2 )
• Barre antirollio (1 fig.A1 )
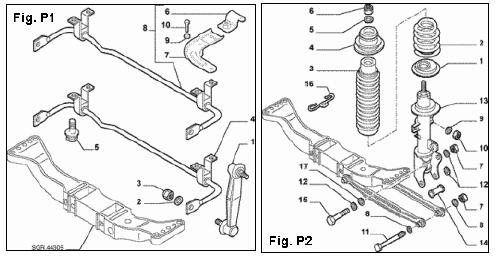
Varianti componenti della sospensione Posteriore
Nelle sottostanti figure sono illustrati i componenti specifici per la versione Q2, essi sono:
• Ammortizzatore ( 13 fig.P2 )
• Tamponi ( 3 fig.P2 )
• Barre antirollio (8 fig.P1 )
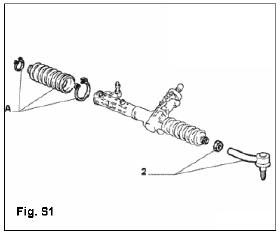
Varianti componenti della scatola idroguida
Nelle sottostanti figure sono illustrati i componenti specifici per la versione Q2, essi sono:
• Testa tiranti sterzo ( 2 fig.S1 )
Varianti componenti del cambio di velocità C530-6
Nelle sottostanti figure sono illustrati i componenti specifici per la versione Q2, essi sono:
• Differenziale anteriore TorSen B ( 1 fig.D1 )
Varianti componenti dell’impianto elettrico
Nelle sottostanti figure sono illustrati i componenti specifici per la versione Q2, essi sono:
• Centralina elettronica ABS ( 2 fig.C1 )
COMPONENTI DIFFERENZIALE TORSEN B
Nella figura sottostante è illustrato l’esploso del differenziale TorSen B del sistema Q2.
Legenda:
1. Coperchio scatola differenziale
2. Scatola differenziale
3. Anelli d’attrito inferiori
4. Anelli d’attrito centrali
5. Anelli d’attrito superiori
6. Solare
7. Solare
8. Planetario
9. Uscita semiasse
10. Uscita semiasse
11. Ingresso coppia motrice mediante corona dentata
12. Vite
FUNZIONAMENTO DEL DIFFERENZIALE TORSEN
Generalità
L’avvento dell’elettronica in campo automobilistico e la diffusione dei sistemi ABS, ha permesso l’introduzione di un’altro metodo per ovviare al problema del controllo sulla distribuzione della coppia motrice agli assi condotti tipico del differenziale "aperto".
Il controllo elettronico della trazione, utilizzando i sensori ABS, attiva il freno della ruota che gira molto più velocemente sullo stesso asse, cioè a quella con minore aderenza.
In questo modo, si può dare gas senza problemi, il differenziale "aperto" manderà una quantità di coppia motrice minore alla ruota che slitta (dove però è assorbita dal freno) e maggiore alla ruota con trazione, che provvederà a far muovere il veicolo.
Questo sistema adottato ha la necessità per intervenire che una ruota slitti; questo comporta comunque una perdita di aderenza e di trazione prima che il sistema intervenga, con conseguente riduzione della velocità del veicolo.
Inoltre l’applicazione del freno sulla ruota con poca aderenza assorbe coppia motrice, riducendone la quantità disponibile per far avanzare il veicolo.
Infine, su terreni molto scivolosi, il continuo intervento del sistema può sollecitare pesantemente i freni.
Il differenziale TorSen “meccanico” anticipa gli slittamenti della ruota.
La configurazione del differenziale TorSen è più complessa di quella di un differenziale "aperto", permettendo di distribuire la coppia motrice applicata in modo ineguale agli assi condotti nel caso in cui la velocità di rotazione degli assi condotti sia diversa.
Prima di iniziare la descrizione del funzionamento del differenziale, occorre introdurre il concetto di “TBR” o “Rapporto di Sbilanciamento di Coppia” che vuol dire:
• Torque (coppia)
• Bias (deviazione)
• Ratio (rapporto)
che indica il rapporto tra la coppia applicata alla ruota che gira più lentamente rispetto alla coppia applicata alla ruota che gira più velocemente.
Ad esempio: TBR = 3 (talvolta il TBR è espresso “1 : 3”) applicando sull’albero conduttore del differenziale una coppia di 2000Nm, quest’ultimo trasmetterà 500Nm alla ruota che slitta e 1500Nm alla ruota che ha maggiore trazione.
Il vantaggio rispetto un differenziale "aperto" è evidente, la ruota che non slitta riceve una coppia motrice sostanzialmente maggiore a tutto beneficio della trazione.
Le “Leggi” che descrivono il differenziale TorSen sono:
• I° Legge: La velocità di rotazione dell’albero conduttore è sempre il valore medio delle velocità degli alberi condotti (come in un differenziale ""aperto"")
• II° Legge: La somma delle coppie disponibili sugli alberi condotti è sempre uguale a quella applicata all’albero condotto, ma l’albero che ruota più lentamente riceve TBR volte più coppia dell’albero che ruota più velocemente.
• % bloccaggio = (TBR - 1) / (TBR + 1) x100
Si può dire dunque che un TorSen è una sorta di compromesso, che cerca di mantenere il meglio del differenziale "aperto", permettendo agli assi condotti di ruotare a velocità diverse, e un po’ del buono di un differenziale "bloccato", trasmettendo più coppia motrice alla ruota con maggiore trazione, cosa utile sui terreni con poca aderenza.
Il TorSen non distribuisce uniformemente la coppia tra i due assi nelle curve, poiché nelle curve una ruota gira più velocemente dell’altra, e il TorSen agisce comunque rispettando la II° Legge.
L’effetto è che il guidatore percepisce una sensazione di auto-raddrizzamento delle ruote, modesta ma avvertibile.
In generale, per minimizzare le reazioni al volante sarà conveniente adottare un TorSen con un TBR basso che influenza di meno la guida in curva.
Il differenziale TorSen, in poche parole, garantisce una ripartizione dinamica (tra le due ruote anteriori motrici) della trazione in accelerazione ed in rilascio, coerentemente con l’aderenza a terra, ottimizzando la stabilità e massimizzando il piacere di guida.
In effetti guidando una vettura con sistema Q2, il conducente avverte una maggiore sicurezza che può essere tradotta in sintesi:
+ più tenuta di strada
+ più trazione
+ più stabilità in rilascio
- meno sottosterzo in accelerazione
- meno interventi dei controlli elettronici di trazione e stabilità è più piacere di guida.
Funzionamento del Torsen B
Il differenziale TorSen B è posizionato nel cambio di velocità nella stessa posizione che ha il differenziale anteriore tradizionale.
La coppia motrice proveniente dal motore/cambio (11) viene trasmessa alla corona del differenziale la quale è solidale alle due semiscatole (1) e (2).
All’interno della scatola del differenziale (2) sono ricavate n°5 sedi dove sono alloggiate 5 coppie di planetari (8) con dentatura elicoidale; essi possono ruotare sul proprio asse all’interno della loro sede che li contiene.
La scatola del differenziale mette in rotazione attorno all’asse trasversale del differenziale i planetari (8) che a sua volta trasmettono una coppia di rotazione ai Solari (6 e 7) ingranati per mezzo di una dentatura elicoidali. In cascata i Solari (6 e 7) trasmettono il moto ai semi-assi delle ruote motrici anteriori (9,10).
Nel caso in cui la coppia resistente a terra trasmessa dal terreno alla ruote motrici non sia omogenea, (esempio percorrenza su terreni con aderenza variabile o in curva ), il solare collegato al semiasse della ruota (9 o10) con minore aderenza “tenderebbe” a ruotare più velocemente dell’altro; in queste condizioni sulla dentatura di contatto (solare-planetario) si generano delle spinte assiali (vedi figura seguente) che si
scaricano sugli anelli d’attrito, impedendo al solare relativo alla ruota con minore aderenza di girare più velocemente.
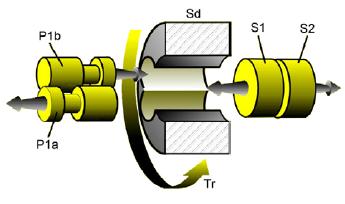
Legenda:
P1a: Planetario
P1b: Planetario
Sd : scatola differenziale
S1: Solare 1
S2: Solare 2
Tr: Coppia motrice applicata
In questo modo la coppia erogata dal motore non viene scaricata interamente sulla ruota con minore aderenza ( Differenziale aperto) ma trasferita in buona parte sulla ruota con le migliori condizioni di aderenza ( effetto autobloccante).
A seconda delle condizioni ambientali d’utilizzo del veicolo “TIRO” o “RILASCIO” su terreni con aderenza variabile o in curva, entrano in gioco un numero differente di anelli d’attrito ( 3,4,5), i quali sono responsabili della ripartizione differenziata della coppia motrice verso i semi-assi delle ruote motrici anteriori (9,10).
Oltre certi valori di bloccaggio il differenziale si apre e permette rotazioni diverse tra i due semi-assi delle ruote motrici anteriori (9,10).
Schema Funzionale del gruppo epicicloidale (velocità o giri ingresso cambio = zero)
Nella sottostante figura è illustrato il funzionamento del gruppo epicicloidale nelle condizioni:
• Motore spento
• Velocità ingresso cambio zero (cambio in folle)
• Ruote anteriori alzate dal terreno
In queste condizioni ruotando la ruota (esempio destra) collegata al semiasse “R2” ,si impone una rotazione anche al Solare “S2”. Quest’ultimo collegato, mediante una dentatura elicoidale, trasferisce il
moto al planetario “P1a” e a sua volta al planetario “P1b” (i planetari “P1a” e “P1b” sono collegati tra di loro mediante dentatura elicoidale). Il planetario P1b è collegato al solare “S2”, mediante una dentatura elicoidale, quest’ultimo trasferisce il moto al semiasse “R1” collegato alla ruota (esempio sinistra) invertito rispetto al semiasse “R2”.
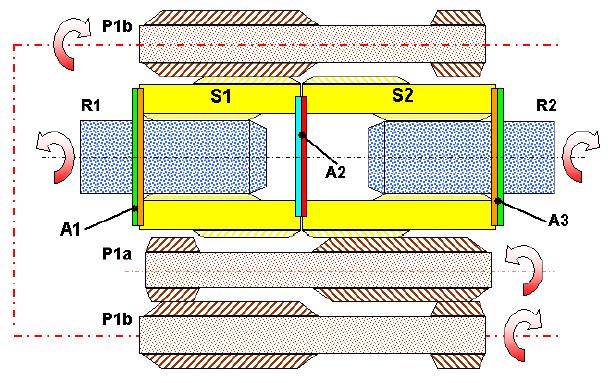
Nota: nella figura è illustrato il collegamento di un solo gruppo planetario di cinque presenti. Per esigenze illustrative il planetario “P1b” è stato disegnato due volte per evidenziare il collegamento con il solare
“S1”, ma in realtà e accoppiato al planetario “P1a”.
Legenda:
A1: Anelli di attrito inferiori
A2: Anelli di attrito centrali
A3: Anelli di attrito superiori
P1a: Planetario a
P1b: Planetario b
R1: Semiasse ( esempio sinistro )
R2: Semiasse ( esempio destra )
S1: Solare 1
S2: Solare 2
Di seguito si può vedere il dettaglio dell’accoppiamento tra i cinque coppie di planetari e i due solari:
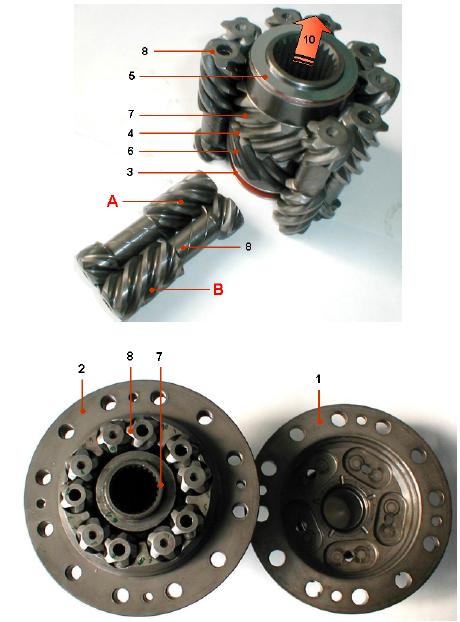
Legenda:
1. Coperchio scatola differenziale
2. Scatola differenziale
3. Anelli d’attrito inferiori
4. Anelli d’attrito centrali
5. Anelli d’attrito superiori
6. Solare destro
7. Solare sinistro
8. Planetario
9. Uscita semiasse destro
10. Uscita semiasse sinistro
11. Ingresso coppia motrice mediante
corona dentata
12. Vite
Schema Funzionale del gruppo epicicloidale ( in tiro e rilascio)
Il gruppo epicicloidale ha un comportamento autobloccante diverso in base alla condizioni di guida e ambientali diverse.
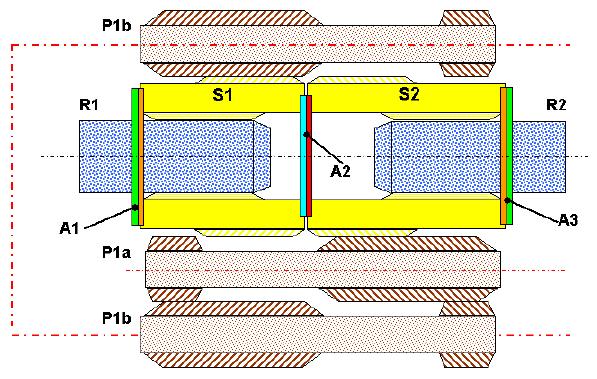
In tiro
Il gruppo epicicloidale del differenziale Torsen B in condizioni di guida in “Tiro” (accelerazione) del veicolo, i solari S1 e S2 attivano gli anelli di attrito (A1) e (A3). In queste condizioni si ha un effetto autobloccante del 25% ( TBR = 1.690 ).
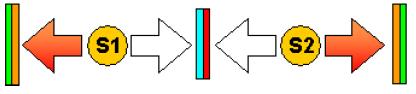
Nota: in tiro l’asse che vorrebbe girare più veloce è l’asse con meno attrito
In rilascio
Il gruppo epicicloidale del differenziale Torsen B in condizioni di guida in “Rilascio” (decelerazione) del veicolo, i solari (S1) e (S2) attivano gli anelli di attrito (A2). In queste condizioni si ha un effetto autobloccante del 28% ( TBR = 1.785 ).
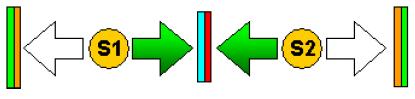
Nota: In rilascio l’asse che vorrebbe girare più veloce è l’asse con più attrito
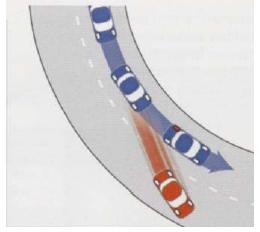
Comportamento dinamico in curva senza Sistema Q2
Percorrendo una curva in condizioni di scarsa aderenza (strada bagnata, innevata, fango, ecc.) spesso ci si trova nella condizione di perdita di aderenza della ruota interna, dovuta al fatto che il differenziale ripartisce la coppia alla ruota più “scarica” sottraendola a quella esterna che, essendo gravata dal peso aggiuntivo del rollio della vettura, potrebbe sfruttare un attrito complessivo più elevato.
In questa situazione si possono avere due risposte diverse a seconda dell’equipaggiamento della vettura:
Caso1- ABS senza ASR - VDC, il risultato percepito è un pattinamento della ruota interna, una perdita di controllo del veicolo (forte sottosterzo) e la mancanza di accelerazione all’uscita della curva.
Caso2- ABS dotata di ASR - VDC, l’intervento dei sistemi di assistenza alla guida tolgono potenza al motore, intervenendo sulla valvola a farfalla, rendendo di fatto impossibile la modulazione dell’acceleratore e dando una sensazione di calo di potenza e interazione con la vettura.
In entrambi i casi il risultato è che all’uscita di una curva si ha la sensazione di essere “fermi”.
Comportamento dinamico in curva con Sistema Q2
Caso1 - trazione in curva
Nel momento in cui la ruota interna inizia a perdere aderenza, il differenziale trasferisce parte della coppia disponibile verso la ruota esterna, prevenendo lo slittamento della ruota interna e generando un momento imbardante che contribuisce a ridurre il sottosterzo.
Il sistema Q2 ottimizzando l’aderenza contribuisce ad una maggiore stabilità, una più alta velocità di percorrenza della curva, un intervento dei sistemi di controllo del veicolo meno frequenti e invasivi. A tutto vantaggio dei piacere di guida e del pieno controllo del veicolo.
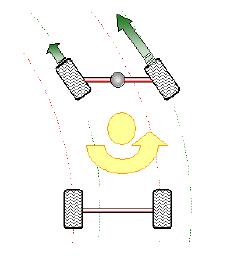
Caso2 - rilascio in curva
Nel rilascio in curva, lo squilibrio di coppia va a favore della ruota esterna, contribuendo a ridurre il sovrasterzo.
Comportamento su terreni a scarsa aderenza
Comportamento dinamico senza Sistema Q2
Nella marcia su terreni con condizioni di bassa aderenza, spesso succede di avere le ruote motrici in condizioni di diversa motricità. Per esempio, percorrendo una strada dopo una nevicata o una pioggia intensa, una ruota si trova sul margine della carreggiata, a diretto contatto con la neve residua, mentre l’altra si trova in una zona già pulita o asciutta.
In queste particolari condizioni, una partenza o una forte accelerata porta ad avere uno slittamento della ruota con condizioni critiche di attrito, con forti reazioni sul volante, uno spunto inadeguato e la necessità di effettuare continue correzioni con il volante per mantenere la traiettoria.
Comportamento dinamico con Sistema Q2
Gli effetti negativi vengono contrastati grazie al trasferimento progressivo di coppia verso la ruota che può sfruttare il maggiore coefficiente di attrito, rendendo più semplice, ad esempio, una partenza in salita su una strada di montagna e più sicura e confortevole la marcia su tratti di strada con mutevoli condizioni del manto stradale.
Insomma, il sofisticato sistema Q2 è l’ennesima dimostrazione dell’eccellenza Alfa Romeo nella ricerca di soluzioni tecniche orientate alla sicurezza e al piacere di guida.
• differenziare la velocità delle ruote o dei due assi in curva, a seconda che sia montato rispettivamente su un asse oppure in posizione centrale;
• evitare lo slittamento di una ruota o entrambe (in caso di TorSen centrale) in condizioni di scarsa aderenza, forzando la coppia ad andare verso la ruota o l’asse a maggiore aderenza.
Esistono tre diverse tipologie di TorSen, classificati come A, B o C. Differiscono l’uno dall’altro per la diversa geometria degli ingranaggi, ma il principio di funzionamento per ottenere il bloccaggio è lo stesso nelle tre configurazioni. In sintesi nella tabella sottostante sono evidenziate le caratteristiche peculiari:
Nelle nuove versioni 147 e GT Q2, oltre all’incremento del differenziale epicicloidale TorSen B sono state apportate delle modifiche alle sospensioni per una maggiore rigidezza, e al software della centralina ABS (cambiate le soglie d’intervento del sistema VDC).
Varianti componenti della sospensione Anteriore
Nelle sottostanti figure sono illustrati i componenti specifici per la versione Q2, essi sono:
• Ammortizzatore ( 4 fig.A2 )
• Tamponi ( 2 fig.A2 )
• Barre antirollio (1 fig.A1 )
Varianti componenti della sospensione Posteriore
Nelle sottostanti figure sono illustrati i componenti specifici per la versione Q2, essi sono:
• Ammortizzatore ( 13 fig.P2 )
• Tamponi ( 3 fig.P2 )
• Barre antirollio (8 fig.P1 )
Varianti componenti della scatola idroguida
Nelle sottostanti figure sono illustrati i componenti specifici per la versione Q2, essi sono:
• Testa tiranti sterzo ( 2 fig.S1 )
Varianti componenti del cambio di velocità C530-6
Nelle sottostanti figure sono illustrati i componenti specifici per la versione Q2, essi sono:
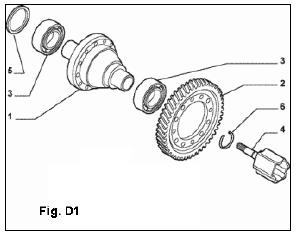
• Differenziale anteriore TorSen B ( 1 fig.D1 )
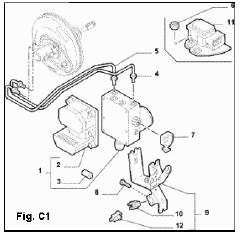
Varianti componenti dell’impianto elettrico
Nelle sottostanti figure sono illustrati i componenti specifici per la versione Q2, essi sono:
• Centralina elettronica ABS ( 2 fig.C1 )
COMPONENTI DIFFERENZIALE TORSEN B
Nella figura sottostante è illustrato l’esploso del differenziale TorSen B del sistema Q2.
Legenda:
1. Coperchio scatola differenziale
2. Scatola differenziale
3. Anelli d’attrito inferiori
4. Anelli d’attrito centrali
5. Anelli d’attrito superiori
6. Solare
7. Solare
8. Planetario
9. Uscita semiasse
10. Uscita semiasse
11. Ingresso coppia motrice mediante corona dentata
12. Vite
FUNZIONAMENTO DEL DIFFERENZIALE TORSEN
Generalità
L’avvento dell’elettronica in campo automobilistico e la diffusione dei sistemi ABS, ha permesso l’introduzione di un’altro metodo per ovviare al problema del controllo sulla distribuzione della coppia motrice agli assi condotti tipico del differenziale "aperto".
Il controllo elettronico della trazione, utilizzando i sensori ABS, attiva il freno della ruota che gira molto più velocemente sullo stesso asse, cioè a quella con minore aderenza.
In questo modo, si può dare gas senza problemi, il differenziale "aperto" manderà una quantità di coppia motrice minore alla ruota che slitta (dove però è assorbita dal freno) e maggiore alla ruota con trazione, che provvederà a far muovere il veicolo.
Questo sistema adottato ha la necessità per intervenire che una ruota slitti; questo comporta comunque una perdita di aderenza e di trazione prima che il sistema intervenga, con conseguente riduzione della velocità del veicolo.
Inoltre l’applicazione del freno sulla ruota con poca aderenza assorbe coppia motrice, riducendone la quantità disponibile per far avanzare il veicolo.
Infine, su terreni molto scivolosi, il continuo intervento del sistema può sollecitare pesantemente i freni.
Il differenziale TorSen “meccanico” anticipa gli slittamenti della ruota.
La configurazione del differenziale TorSen è più complessa di quella di un differenziale "aperto", permettendo di distribuire la coppia motrice applicata in modo ineguale agli assi condotti nel caso in cui la velocità di rotazione degli assi condotti sia diversa.
Prima di iniziare la descrizione del funzionamento del differenziale, occorre introdurre il concetto di “TBR” o “Rapporto di Sbilanciamento di Coppia” che vuol dire:
• Torque (coppia)
• Bias (deviazione)
• Ratio (rapporto)
che indica il rapporto tra la coppia applicata alla ruota che gira più lentamente rispetto alla coppia applicata alla ruota che gira più velocemente.
Ad esempio: TBR = 3 (talvolta il TBR è espresso “1 : 3”) applicando sull’albero conduttore del differenziale una coppia di 2000Nm, quest’ultimo trasmetterà 500Nm alla ruota che slitta e 1500Nm alla ruota che ha maggiore trazione.
Il vantaggio rispetto un differenziale "aperto" è evidente, la ruota che non slitta riceve una coppia motrice sostanzialmente maggiore a tutto beneficio della trazione.
Le “Leggi” che descrivono il differenziale TorSen sono:
• I° Legge: La velocità di rotazione dell’albero conduttore è sempre il valore medio delle velocità degli alberi condotti (come in un differenziale ""aperto"")
• II° Legge: La somma delle coppie disponibili sugli alberi condotti è sempre uguale a quella applicata all’albero condotto, ma l’albero che ruota più lentamente riceve TBR volte più coppia dell’albero che ruota più velocemente.
• % bloccaggio = (TBR - 1) / (TBR + 1) x100
Si può dire dunque che un TorSen è una sorta di compromesso, che cerca di mantenere il meglio del differenziale "aperto", permettendo agli assi condotti di ruotare a velocità diverse, e un po’ del buono di un differenziale "bloccato", trasmettendo più coppia motrice alla ruota con maggiore trazione, cosa utile sui terreni con poca aderenza.
Il TorSen non distribuisce uniformemente la coppia tra i due assi nelle curve, poiché nelle curve una ruota gira più velocemente dell’altra, e il TorSen agisce comunque rispettando la II° Legge.
L’effetto è che il guidatore percepisce una sensazione di auto-raddrizzamento delle ruote, modesta ma avvertibile.
In generale, per minimizzare le reazioni al volante sarà conveniente adottare un TorSen con un TBR basso che influenza di meno la guida in curva.
Il differenziale TorSen, in poche parole, garantisce una ripartizione dinamica (tra le due ruote anteriori motrici) della trazione in accelerazione ed in rilascio, coerentemente con l’aderenza a terra, ottimizzando la stabilità e massimizzando il piacere di guida.
In effetti guidando una vettura con sistema Q2, il conducente avverte una maggiore sicurezza che può essere tradotta in sintesi:
+ più tenuta di strada
+ più trazione
+ più stabilità in rilascio
- meno sottosterzo in accelerazione
- meno interventi dei controlli elettronici di trazione e stabilità è più piacere di guida.
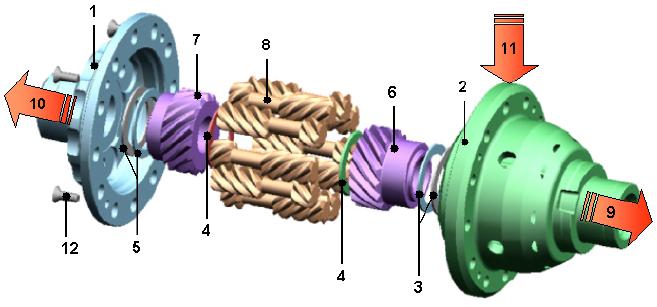
Funzionamento del Torsen B
Il differenziale TorSen B è posizionato nel cambio di velocità nella stessa posizione che ha il differenziale anteriore tradizionale.
La coppia motrice proveniente dal motore/cambio (11) viene trasmessa alla corona del differenziale la quale è solidale alle due semiscatole (1) e (2).
All’interno della scatola del differenziale (2) sono ricavate n°5 sedi dove sono alloggiate 5 coppie di planetari (8) con dentatura elicoidale; essi possono ruotare sul proprio asse all’interno della loro sede che li contiene.
La scatola del differenziale mette in rotazione attorno all’asse trasversale del differenziale i planetari (8) che a sua volta trasmettono una coppia di rotazione ai Solari (6 e 7) ingranati per mezzo di una dentatura elicoidali. In cascata i Solari (6 e 7) trasmettono il moto ai semi-assi delle ruote motrici anteriori (9,10).
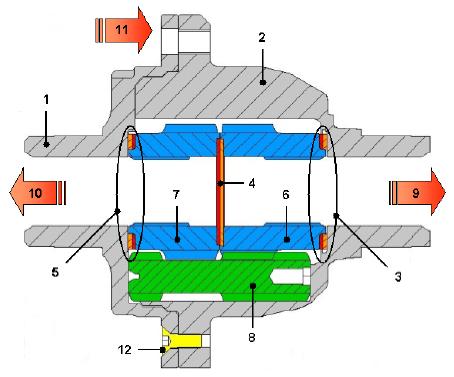
Nel caso in cui la coppia resistente a terra trasmessa dal terreno alla ruote motrici non sia omogenea, (esempio percorrenza su terreni con aderenza variabile o in curva ), il solare collegato al semiasse della ruota (9 o10) con minore aderenza “tenderebbe” a ruotare più velocemente dell’altro; in queste condizioni sulla dentatura di contatto (solare-planetario) si generano delle spinte assiali (vedi figura seguente) che si
scaricano sugli anelli d’attrito, impedendo al solare relativo alla ruota con minore aderenza di girare più velocemente.
Legenda:
P1a: Planetario
P1b: Planetario
Sd : scatola differenziale
S1: Solare 1
S2: Solare 2
Tr: Coppia motrice applicata
In questo modo la coppia erogata dal motore non viene scaricata interamente sulla ruota con minore aderenza ( Differenziale aperto) ma trasferita in buona parte sulla ruota con le migliori condizioni di aderenza ( effetto autobloccante).
A seconda delle condizioni ambientali d’utilizzo del veicolo “TIRO” o “RILASCIO” su terreni con aderenza variabile o in curva, entrano in gioco un numero differente di anelli d’attrito ( 3,4,5), i quali sono responsabili della ripartizione differenziata della coppia motrice verso i semi-assi delle ruote motrici anteriori (9,10).
Oltre certi valori di bloccaggio il differenziale si apre e permette rotazioni diverse tra i due semi-assi delle ruote motrici anteriori (9,10).
Schema Funzionale del gruppo epicicloidale (velocità o giri ingresso cambio = zero)
Nella sottostante figura è illustrato il funzionamento del gruppo epicicloidale nelle condizioni:
• Motore spento
• Velocità ingresso cambio zero (cambio in folle)
• Ruote anteriori alzate dal terreno
In queste condizioni ruotando la ruota (esempio destra) collegata al semiasse “R2” ,si impone una rotazione anche al Solare “S2”. Quest’ultimo collegato, mediante una dentatura elicoidale, trasferisce il
moto al planetario “P1a” e a sua volta al planetario “P1b” (i planetari “P1a” e “P1b” sono collegati tra di loro mediante dentatura elicoidale). Il planetario P1b è collegato al solare “S2”, mediante una dentatura elicoidale, quest’ultimo trasferisce il moto al semiasse “R1” collegato alla ruota (esempio sinistra) invertito rispetto al semiasse “R2”.
Nota: nella figura è illustrato il collegamento di un solo gruppo planetario di cinque presenti. Per esigenze illustrative il planetario “P1b” è stato disegnato due volte per evidenziare il collegamento con il solare
“S1”, ma in realtà e accoppiato al planetario “P1a”.
Legenda:
A1: Anelli di attrito inferiori
A2: Anelli di attrito centrali
A3: Anelli di attrito superiori
P1a: Planetario a
P1b: Planetario b
R1: Semiasse ( esempio sinistro )
R2: Semiasse ( esempio destra )
S1: Solare 1
S2: Solare 2
Di seguito si può vedere il dettaglio dell’accoppiamento tra i cinque coppie di planetari e i due solari:
Legenda:
1. Coperchio scatola differenziale
2. Scatola differenziale
3. Anelli d’attrito inferiori
4. Anelli d’attrito centrali
5. Anelli d’attrito superiori
6. Solare destro
7. Solare sinistro
8. Planetario
9. Uscita semiasse destro
10. Uscita semiasse sinistro
11. Ingresso coppia motrice mediante
corona dentata
12. Vite
Schema Funzionale del gruppo epicicloidale ( in tiro e rilascio)
Il gruppo epicicloidale ha un comportamento autobloccante diverso in base alla condizioni di guida e ambientali diverse.
In tiro
Il gruppo epicicloidale del differenziale Torsen B in condizioni di guida in “Tiro” (accelerazione) del veicolo, i solari S1 e S2 attivano gli anelli di attrito (A1) e (A3). In queste condizioni si ha un effetto autobloccante del 25% ( TBR = 1.690 ).
Nota: in tiro l’asse che vorrebbe girare più veloce è l’asse con meno attrito
In rilascio
Il gruppo epicicloidale del differenziale Torsen B in condizioni di guida in “Rilascio” (decelerazione) del veicolo, i solari (S1) e (S2) attivano gli anelli di attrito (A2). In queste condizioni si ha un effetto autobloccante del 28% ( TBR = 1.785 ).
Nota: In rilascio l’asse che vorrebbe girare più veloce è l’asse con più attrito
Comportamento dinamico in curva senza Sistema Q2
Percorrendo una curva in condizioni di scarsa aderenza (strada bagnata, innevata, fango, ecc.) spesso ci si trova nella condizione di perdita di aderenza della ruota interna, dovuta al fatto che il differenziale ripartisce la coppia alla ruota più “scarica” sottraendola a quella esterna che, essendo gravata dal peso aggiuntivo del rollio della vettura, potrebbe sfruttare un attrito complessivo più elevato.
In questa situazione si possono avere due risposte diverse a seconda dell’equipaggiamento della vettura:
Caso1- ABS senza ASR - VDC, il risultato percepito è un pattinamento della ruota interna, una perdita di controllo del veicolo (forte sottosterzo) e la mancanza di accelerazione all’uscita della curva.
Caso2- ABS dotata di ASR - VDC, l’intervento dei sistemi di assistenza alla guida tolgono potenza al motore, intervenendo sulla valvola a farfalla, rendendo di fatto impossibile la modulazione dell’acceleratore e dando una sensazione di calo di potenza e interazione con la vettura.
In entrambi i casi il risultato è che all’uscita di una curva si ha la sensazione di essere “fermi”.
Comportamento dinamico in curva con Sistema Q2
Caso1 - trazione in curva
Nel momento in cui la ruota interna inizia a perdere aderenza, il differenziale trasferisce parte della coppia disponibile verso la ruota esterna, prevenendo lo slittamento della ruota interna e generando un momento imbardante che contribuisce a ridurre il sottosterzo.
Il sistema Q2 ottimizzando l’aderenza contribuisce ad una maggiore stabilità, una più alta velocità di percorrenza della curva, un intervento dei sistemi di controllo del veicolo meno frequenti e invasivi. A tutto vantaggio dei piacere di guida e del pieno controllo del veicolo.
Caso2 - rilascio in curva
Nel rilascio in curva, lo squilibrio di coppia va a favore della ruota esterna, contribuendo a ridurre il sovrasterzo.
Comportamento su terreni a scarsa aderenza
Comportamento dinamico senza Sistema Q2
Nella marcia su terreni con condizioni di bassa aderenza, spesso succede di avere le ruote motrici in condizioni di diversa motricità. Per esempio, percorrendo una strada dopo una nevicata o una pioggia intensa, una ruota si trova sul margine della carreggiata, a diretto contatto con la neve residua, mentre l’altra si trova in una zona già pulita o asciutta.
In queste particolari condizioni, una partenza o una forte accelerata porta ad avere uno slittamento della ruota con condizioni critiche di attrito, con forti reazioni sul volante, uno spunto inadeguato e la necessità di effettuare continue correzioni con il volante per mantenere la traiettoria.
Comportamento dinamico con Sistema Q2
Gli effetti negativi vengono contrastati grazie al trasferimento progressivo di coppia verso la ruota che può sfruttare il maggiore coefficiente di attrito, rendendo più semplice, ad esempio, una partenza in salita su una strada di montagna e più sicura e confortevole la marcia su tratti di strada con mutevoli condizioni del manto stradale.
Insomma, il sofisticato sistema Q2 è l’ennesima dimostrazione dell’eccellenza Alfa Romeo nella ricerca di soluzioni tecniche orientate alla sicurezza e al piacere di guida.